|
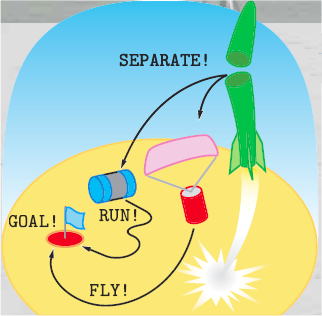
1)はじめに 2005年9月21日から23日にかけて,アメリカ合衆国ブラックロック砂漠にて,ARLISSカンバックコンペティションが行われました.吉田・永谷研のローバーチームは,開発したロケット搭載用小型ローバーの走破性や耐久性等の実験を兼ねてこのコンペに参加し,その結果,総合優勝となりました.以下の記事は,このコンペティションの最終プレゼンテーションで利用した資料を修正した,ARLISS2005の報告です.ARLISS2005の公式のページは,こちら. 2)ARLISSについて ARLISS(A Rocket Launch for International Student Satellites)プロジェクトとは,日米の学生が開発した小型ロボット(ペイロード)をアメリカのアマチュアロケットにより,高度4000メートルまで打ち上げ,ロケットから分離・放出されたペイロードがパラシュートを開き,地面に到達するまでの間に様々な実験を行うプロジェクトです.1999年からアメリカ合衆国ネバダ州Blackrock砂漠において行われています. 私たちは,ペイロードが自力で目標地点に帰還する能力を競う「カンバックコンペティション」に,2002年から参加しています.
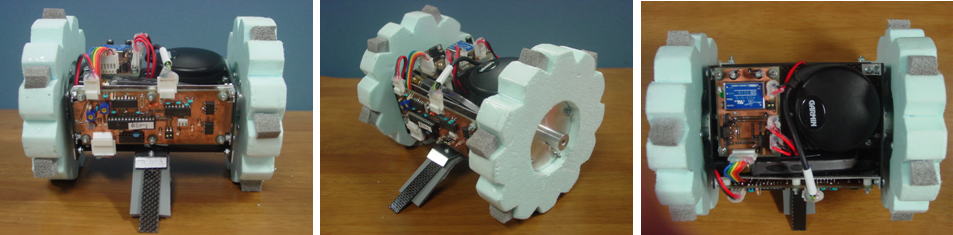
3)開発した小型ローバー 2002年より,吉田研では,ARLISSカンバックコンペティションに「RUN BACK」というアプローチで,参加しております.このRUN BACKアプローチは,ローバーを空中では制御せず,地上に到達した後に,目的地に向かって「走行」するアプローチです.このアプローチを実現するため,2005年に開発したローバー「NOKO NOKO」は,以下のような形態となりました. |

|
このローバー以下の特徴があります.
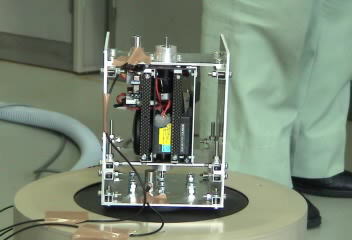
4)各種のテスト ARLISSに参加する前段階として,耐久性や性能確認のための各種テストを行いました.その履歴を以下に示します.
5)最初のトライアル 2005年9月21日,最初のトライアルが行われました.以下に,そのトライアルの状況とムービーを掲載します.
6)2回目のトライアルへ向けて 多少の段差を踏破する能力は備えていた我々のローバーですが,雨上がりの後に走行した車が作った深いわだちは,1回目のトライアルでは,越えることができませんでした.そこで,ローバーの車輪系を多少小さくし,その先に8つのスパイクを備え付けたバージョンを現地で作成しました.その結果,段差や障害物に対する踏破性が大きく向上しました.ただし,摩擦が大きくなった分,総走行距離は短くなる可能性がありました.それでも,2回目のトライアルを行うことを決心しました.その試験を行っている際のムービーを以下に示します. 7)2回目のトライアル 2005年9月23日,2回目のトライアルが行われました.以下に,そのトライアルの状況とムービーを掲載します.
8)結果 今回のARLISSカンバックコンペでは,ゴールから222メートルという記録はゴールまで最短であり,それにより参加した13チームの中で,総合優勝ということとなりました.上位3チームの結果は,以下の通りです.
賞金こそ逃しましたが,我々のローバーが,3時間半の悪天候の走行に耐え,ゴール直前まで到達したというのは,非常に大きな成果でした.また,多くの課題も見えてきました.来年は,安定性や走行スピード,ロバスト性を増したローバーで,再挑戦したいと考えています. |






 (Movie)
(Movie) (Movie)
(Movie)





ARLISS挑戦の歴史
東北大学 吉田・永谷研究室
主な研究内容
宇宙フリーフライングロボットの研究
宇宙ステーション搭載ロボットの研究
月・惑星探査ローバーの研究
小惑星サンプルリターンミッション MUSES-C
(c) The Space Robotics Lab, Tohoku University, JAPAN
All right reserved.
 |
|---|
For any question, please contact here.