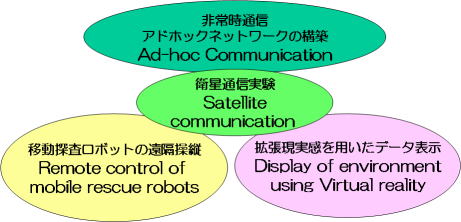
| 研究開発の概要 本研究では,以下に示す4つのサブテーマの実現を目標として,産官学共同で,災害時マルチメディア情報収集技術の研究開発を進めております.
 東北大学
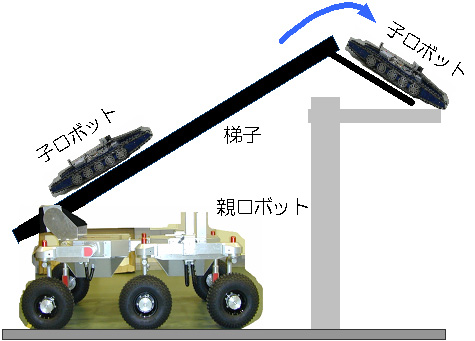
吉田・永谷研究室では,この中でも特に,2の「災害現場における親子型移動探査ロボットの開発とその遠隔操縦技術の確立」を目指し,不整地走行ロボットが、梯子を利用することで,搭載した複数台の小型ロボットを上層階から被災ビル内に展開し、倒壊建造物内の人命探索を行うロボットシステムの実現を目指しています.右図は,このシステムの実現イメージ図です.このシステムを実現するため,本研究室では,以下に示す項目の研究を実施しております。 東北大学
吉田・永谷研究室では,この中でも特に,2の「災害現場における親子型移動探査ロボットの開発とその遠隔操縦技術の確立」を目指し,不整地走行ロボットが、梯子を利用することで,搭載した複数台の小型ロボットを上層階から被災ビル内に展開し、倒壊建造物内の人命探索を行うロボットシステムの実現を目指しています.右図は,このシステムの実現イメージ図です.このシステムを実現するため,本研究室では,以下に示す項目の研究を実施しております。
屋外を移動探査する瓦礫移動ロボットは、路上に散乱する瓦礫の山を乗り越え、倒壊建造物へ接近し、建造物屋内へ人命捜索のための屋内探索ロボットを展開する役割を担います。そのため,同ロボットには,瓦礫上を移動する高い踏破能力が求められ、また急傾斜地を安定的に登る能力も求められます。一方、災害現場へは、ヘリコプターを用いた展開を想定しているため、一般的なヘリの可搬重量を越えないことが要件として挙げられます。これらを実現する不整地移動ロボット(親ロボット)の開発を、現在,IHIエアロスペースと共同で進めております。
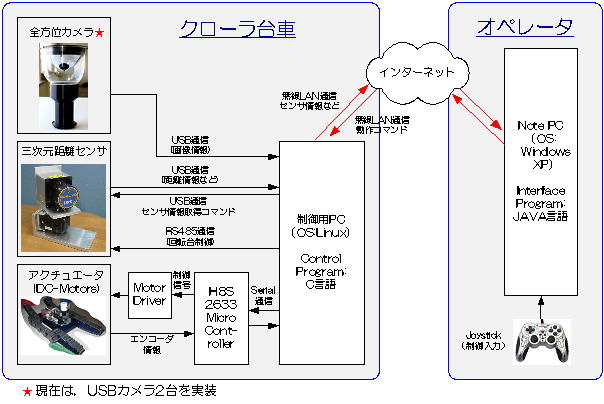
(2)屋内環境探索を行うための小型移動ロボット(子ロボット)の開発 屋内環境探索を行うための小型移動ロボット(子ロボット)は,倒壊家屋内を探索する必要があるため,不整地走行能力が高く,かつ軽量であることが求められます.そこで,本研究では、不整地走行の実績が高いレスキュークローラ(テクノクラフト製 CV04)をベースに、以下の特徴を有する屋内環境探索を目的とした不整地移動ロボットの設計・製作を行いました。以下に、製作を行ったロボットの特徴を示します。
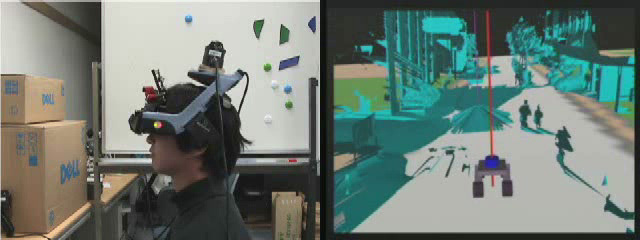
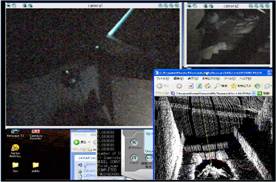 平成17年度には、開発した小型移動探査ロボットを用いて、国際レスキュー機構・神戸ラボの模擬倒壊環境実験設備において遠隔操作実験を行いました。操縦者は、オペレータ用のPCの画面上で、ロボットから伝送される画像と距離センサ情報を見ながら、ジョイスティックによって入力を与えて操縦を行いました。図は、遠隔で操作しているオペレータの画面の様子を示しています。 平成17年度には、開発した小型移動探査ロボットを用いて、国際レスキュー機構・神戸ラボの模擬倒壊環境実験設備において遠隔操作実験を行いました。操縦者は、オペレータ用のPCの画面上で、ロボットから伝送される画像と距離センサ情報を見ながら、ジョイスティックによって入力を与えて操縦を行いました。図は、遠隔で操作しているオペレータの画面の様子を示しています。段差が少なく、明るい環境においては、視覚のみを用いた場合でも、ロボットの遠隔制御は、それほど困難ではありませんが,本実験では、停電した倒壊家屋内という想定であったため、周囲が暗く、良質な画像情報を獲得することが困難でした。さらに、内部は瓦礫が散乱していたため、視覚情報のみでは、その現場の状況を把握することが非常に困難でした。この様な状況において、レーザーレンジセンサによる3次元情報を利用することで、オペレータは周囲の状況を判断してボットが進むべき方向を決定し、遠隔操縦を継続することができました。 また,共同研究者の大阪大学 清川助教授のグループでは,レーザーレンジセンサによって得られた3次元情報に画像をテクスチャとして貼り付ける,ローカルな3次元情報を既存の地図情報と融合する,オペレータの頭の動きに合わせてヘッドマウントディスプレイ上にインタラクティブにイメージを提示する,などの手法を用いて,臨場感の高い拡張現実感を実現し,的確にロボットを遠隔操縦しつつ効果的に情報収集を行う技術の研究開発を進めています.
|


 斜度60度の登坂能力を持ち「梯子を自力登坂して上層階に投入」が可能
斜度60度の登坂能力を持ち「梯子を自力登坂して上層階に投入」が可能 
 三次元環境情報の取得を行うセンサについては、小型ロボットに搭載するため、小型軽量である必要があります。そこで、本研究では、北陽電機製の小型のレーザレンジセンサ(URG)にDinamixel社のサーボモータを取り付けた三次元レンジセンサを製作しました(右図参照).これにより,下図に示すような三次元情報を獲得することが可能となりました.
三次元環境情報の取得を行うセンサについては、小型ロボットに搭載するため、小型軽量である必要があります。そこで、本研究では、北陽電機製の小型のレーザレンジセンサ(URG)にDinamixel社のサーボモータを取り付けた三次元レンジセンサを製作しました(右図参照).これにより,下図に示すような三次元情報を獲得することが可能となりました.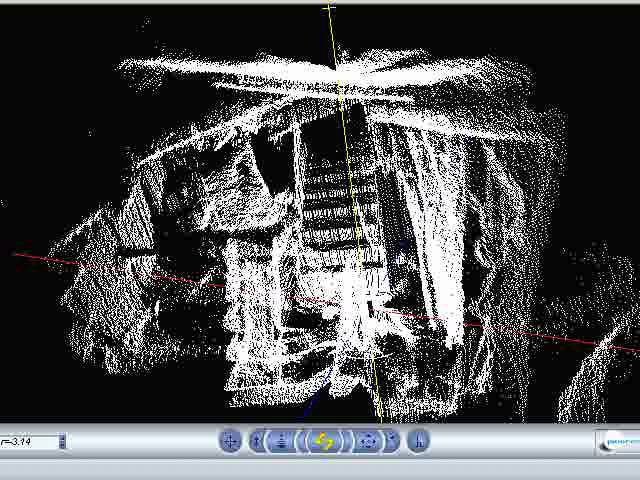
|
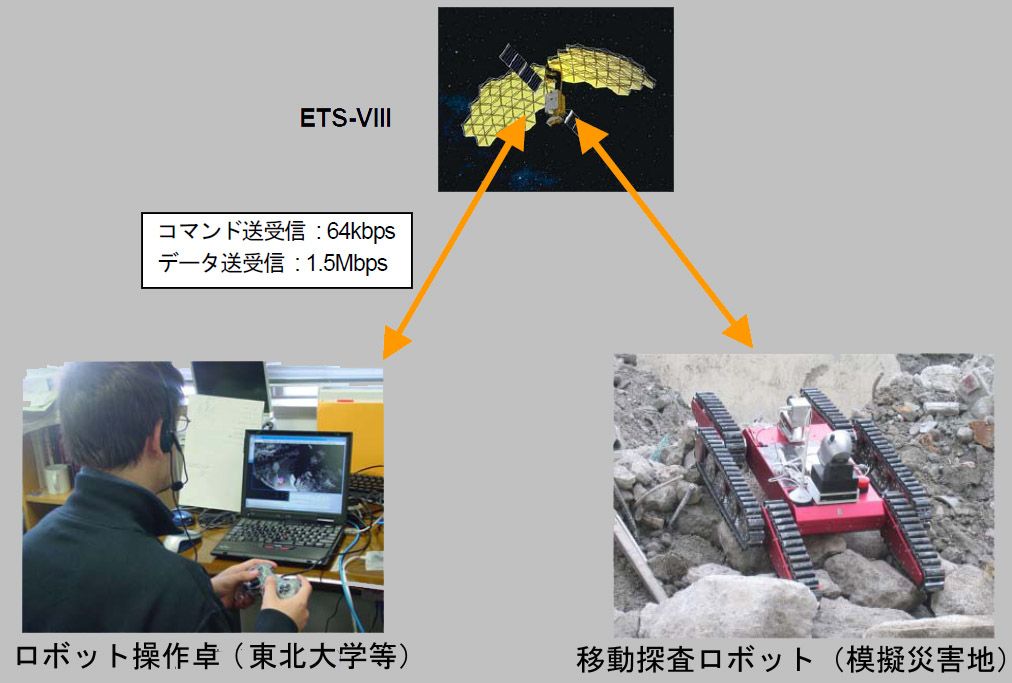
●技術試験衛星VIII型(ETS-VIII,きく8号)は,2006年12月18日H-IIAロケット11号機によって,無事に打ち上げられました.同衛星は,その後静止ドリフト軌道への投入,大型送受信アンテナにも成功し,12月27日にクリティカルフェーズが終了しました.今後は,初期機能確認の後,同衛星を用いたJAXAによる基本実験,外部機関による利用実験が行われる予定です.本プロジェクトによる利用実験(探査ロボットの遠隔操縦,情報収集に関する実験,下図参照)は,2007年11月に実施しました.
|
本研究に関連する主な公表論文・資料
共同研究機関へのリンク
大阪大学 八木研究室
大阪大学 竹村研究室 (清川助教授)
情報通信研究機構 セキュアネットワークグループ
IHIエアロスペース
映蔵
吉田・永谷研の他の研究内容
月・惑星探査ローバーの研究
小惑星探査ミッション MUSES-C
トップページへ.
(c) The Space Robotics Lab, Tohoku University, JAPAN
All right reserved.
 |
|---|
For any question, please contact here.