|
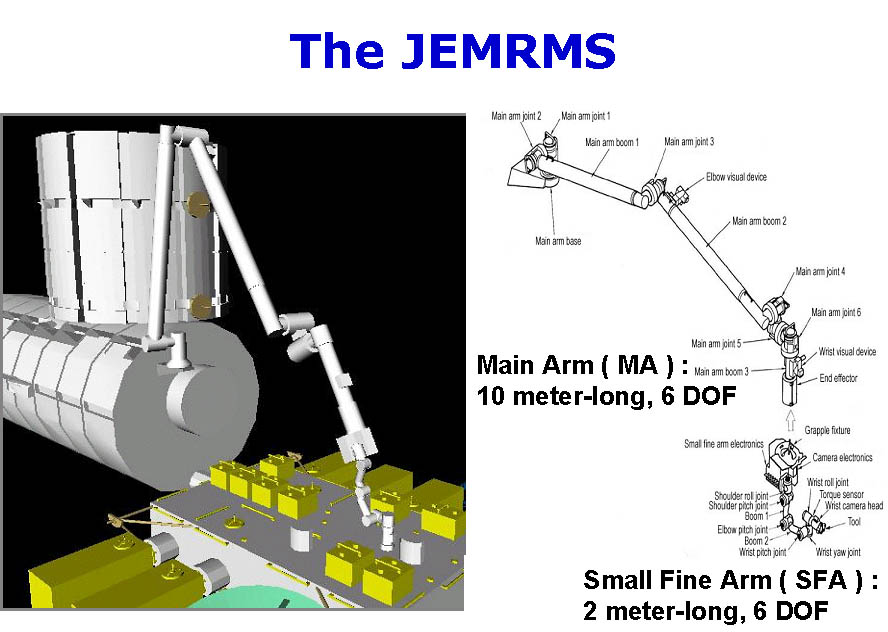
現在建設が進行中である国際宇宙ステーションの日本モジュール(JEM)には,マクロ- マイクロ型の特徴を有するロボットアーム(JEMRMS)が搭載されます.同アームのマク ロ部は10m長のフレキシブルアームであり,精細作業のためにはマクロ-マイクロ部を 協調した高度な制御法が必要となります.現実システムの初期運用においては,ロボ ットアームの動作速度や可搬質量を制限することにより,最低機能を保証する考え方 がとられていますが,制御則を改良すれば,運用性能は飛躍的に向上することが期待 できます.
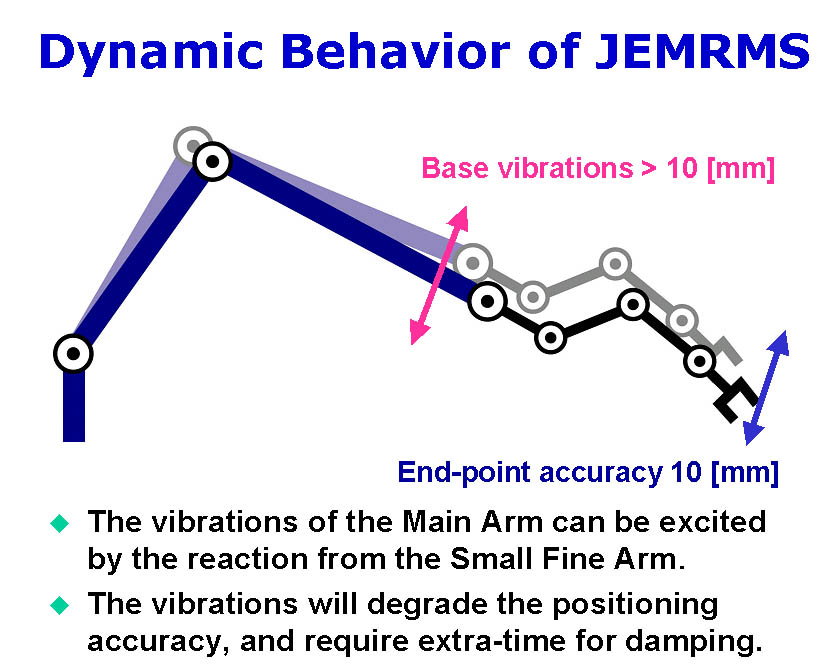
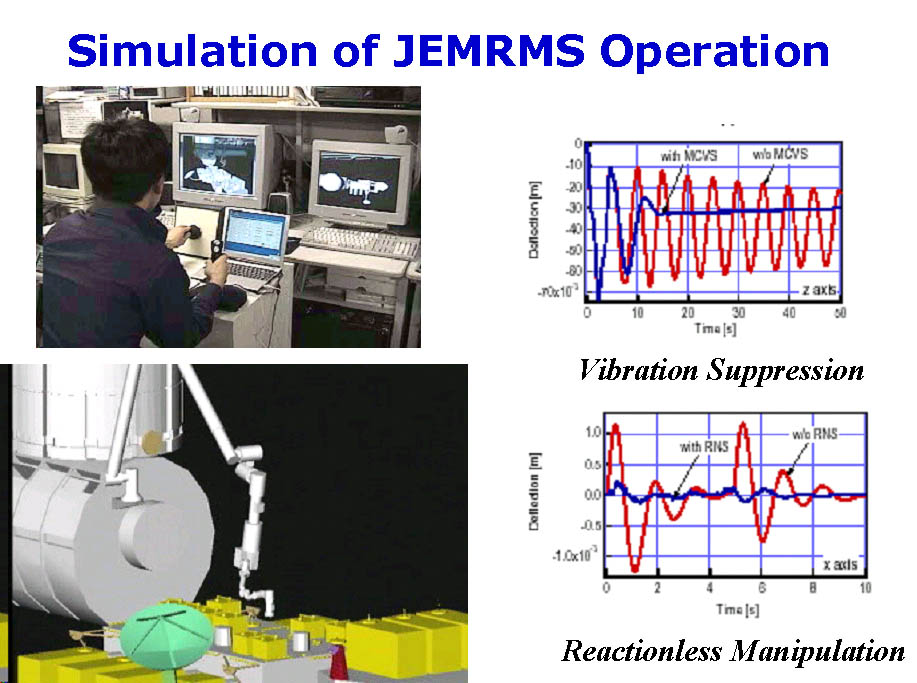
本研究室では,JEMRMSの発展的な高機能操作実現を目指した研究をすすめています. ETS-VIIにおいて実証された「無反動マニピュレーション」の考え方を用いると,フ レキシビリティーの高いマクロ部の振動を抑制しながら作業をおこなうことができま す.また,マイクロ部先端において高い精度の位置決めおよび力制御を行う方式につ いても研究をすすめています.これらの制御則はJEMRMSという特定のハードウェアの 上に実装されなければならないため,宇宙開発事業団の協力を得て(公募型受託研究), JEMRMSのダイナミクスと制御系を模擬するシミュレータの開発もすすめています.
JEMRMSのダイナミクスシミュレーション(mpg, 3.4M) (軌道上交換ユニット:ORU 搬送時に予想される親アームの振動の様子を示しています .) 再構成・歩行機能を備えた精細作業対応・小型多自由度ロボットの研究(pdf, 1.8M) (2000年に終了した公募地上研究フェーズBの成果概要書.ここで提案されている 小型多自由度ロボットをJRMRMS親アームの先端に取り付けると,作業性能の向上が 期待できます.) |
公募地上研究成果報告概要(2003年3月)
公募地上研究成果報告英文概要(2003年3月)
公募地上研究成果詳細報告書(2003年3月)
月・惑星探査ローバーの研究
小惑星探査ミッション MUSES-C
トップページへ.
(c) The Space Robotics Lab, Tohoku University, JAPAN
All right reserved.
 |
|---|
For any question, please contact here.