|
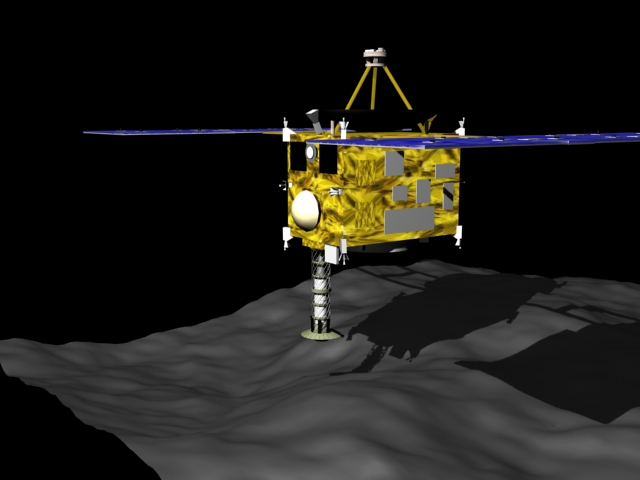
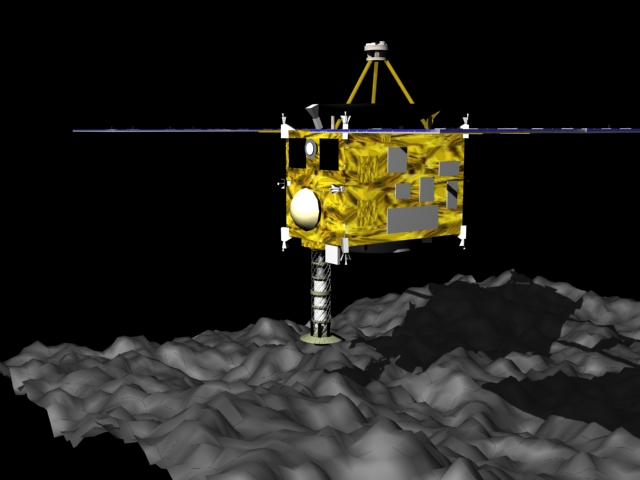
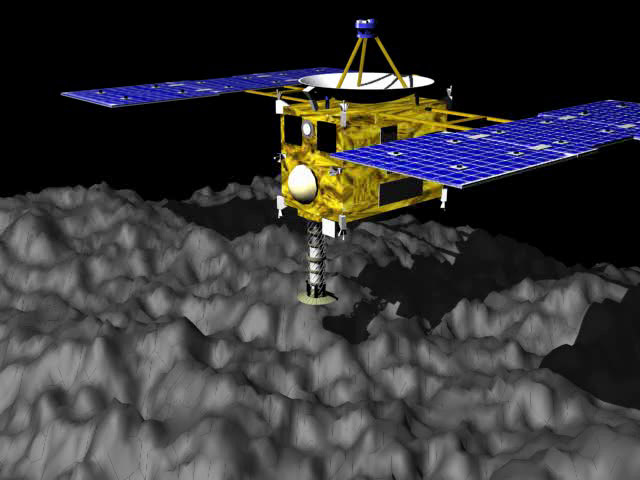
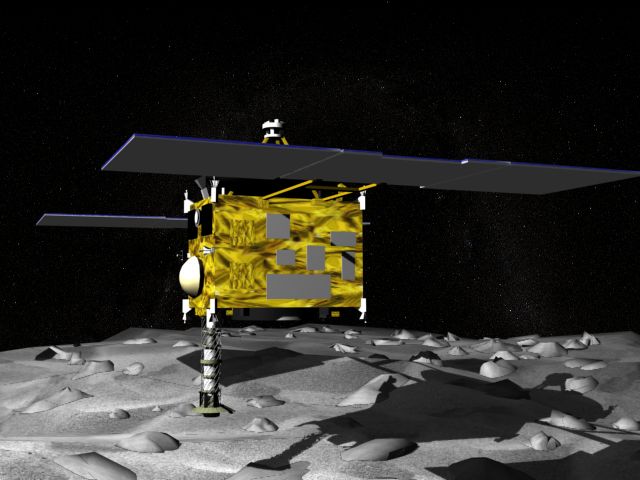
2003年5月9日内之浦より打ち上げられた 小惑星探査機「はやぶさ」が, 2年4ヶ月の旅を経て,2005年9月12日小惑星イトカワから20kmの地点に到着・相対静止に成功し, すばらしい写真が送られてきました. 同探査機は,2005年11月末までに小惑星表面にタッチダウンし,サンプルの採集を試みます. 小惑星表面の様子(詳細な起伏)はタッチダウン直前までわかりませんが,当研究室では,表面の起伏について いくつかのケースを想定してタッチダウンのシミュレーションを行っています.今回は2種類4本の動画を公開します. 「はやぶさ」から送られてきた写真を見ると, イトカワは非常に小さな天体(およそ540m×270m×210m)であるにも かかわらず,表面の様子は変化に富んでいる様子をうかがい知ることができます.表面の大半は岩盤が露出しているのではないか と考えられています.今後さらに科学的な観測を積み重ねて,サンプル採集のためにタッチダウンする地点が選定される ことになります. 自然地形を数学的に模擬する手法として「フラクタル」という概念が知られています.ここでは,フラクタルモデルを を用いて,表面が比較的滑らかな場合と,やや凹凸に富んだ場合について,タッチダウンの様子をシミュレーション してみることにします. 下に,計算の結果得られた,コンピュータグラフィクスを示します. (図をクリックすると動画がスタートします.)
[ムービー一覧] ここに示すグラフィクスは,単なるイメージアニメーションではありません. 私たちが現時点で予測できる最大限の知識に基づいた仮定のもとで,力学的に 起こり得る運動を厳密に評価したものです.以下に考察をまとめます. 小惑星表面には,探査機の底面から伸びているサンプラーホーンと呼ばれる長さ1mのプローブの先端が接触します. サンプラーホーンは,バネのような構造でできているため,小惑星表面に凹凸や起伏があっても,バネの働きによって プローブの先端がうまく表面の凹凸に馴染む様子がシミュレーション結果より見て取れます. 小惑星表面への接触は,サンプラーホーン先端の変形をレーザーファインダーで計測することによって検出します. 小惑星表面への接触が検出されたら,直ちにサンプラーホーン内でプロジェクタイル(金属製の弾)を を発射して表面を打ち砕き,サンプルを採集します. 同時に,探査機の下面に取り付けられた4個のガスジェットスラスタ(小型のロケットエンジン)を噴射して,上昇離脱 します.結果として小惑星表面に接触している時間は,わずかに1秒程度です. 小惑星表面に触れた反動で探査機の姿勢が傾く様子が,シミュレーションより確認できます.この傾き角度は,探査機の 最終降下速度(基本は,真下方向に秒速10cmと計画していますが,実際の着陸降下制御の際にはこの値とは異なる可能性があります)や,表面の凹凸の様子によって異なります.この姿勢の傾きは避けることができません. しかしながら,ガスジェットスラスタが正常に動作すれば,探査機が危険にさらされる可能性は低いと考えられます. また,各ガスジェットスラスタの推力を調整することにより,傾いた姿勢を回復しながら上昇を続けることも可能です. 「はやぶさ」では姿勢制御のためのリアクションホイールのうちの2基が, 故障していることが公表されています. リアクションホイールは,探査機が軌道上を航行している際に姿勢を微調整するためのものであり,現在残り1基の ホイールを使ってミッションが続けられています.タッチダウン直後の探査機の傾きを回復するためには, リアクションホイールではなく,ガスジェットスラスタを使用することが予定されています.よって,ホイールの故障が タッチダウン後の運動に大きな影響を与えることは無いと考えられます. 「はやぶさ」の小惑星ランデブおよびタッチダウンにおける航法誘導制御について学術的,技術的な興味をお持ちの方は, 日本航空宇宙学会誌 2005年8月号(Vol.53, No.619, pp.237-248) に詳細な解説が掲載されていますので,ご参照されることを お勧めします. なお,ここに示すシミュレーション結果は,東北大学吉田研究室の責任に おいて実施し公表するものであり,JAXA公式発表によるものではありません. 「はやぶさ」ミッションについての公式な最新情報は, JAXAのホームページをご参照ください.
主な研究内容 宇宙フリーフライングロボットの研究 宇宙ステーション搭載ロボットの研究 月・惑星探査ローバーの研究 小惑星サンプルリターンミッション MUSES-C (c) The Space Robotics Lab, Tohoku University, JAPAN All right reserved.
For any question, please contact here. |