


| 1. General description about ARLISS project |
|
Participating in the ARLISS 2002 Project A Rocket Launch for International Student Satellites |
| 1. General description about ARLISS project |
|
A Rocket Launch for International Student Satellites (ARLISS) is a project to provide hands-on experience of space engineering with which students can learn a whole process of design, build, test, launch and retrieve of their own payload within a one-year cycle. The payload is launched into the sky of 12,000ft (about 4,000m) altitude by using a high power solid rocket provided by an American rocketry group named the Association of Experimental Rocketry of the Pacific (AERO-PAC). The launch site is Black Rock desert, Nevada, U.S.A. Payloads are classified into two types by their size. One is the size of 350ml soda pop can, then called "CanSat" class, and the other is a cylinder of 6 inch diameter and 10 inch height called "Open class." With a single launch, three of CanSats or one Open class payload is deployed in the sky. After the separation from the rocket booster at apogee, the payload will parachute down in the air taking about 15 minutes. Using this period of time, students can demonstrate the tracking and telemetry with the payload, simulating a horizon-to-horizon low orbit pass of real satellite tracking. Aerodynamic maneuver of the payload using a parafoil is also possible during this period. Or after the landing, the locomotion capability over the natural terrain of the desert can be demonstrated. This would be a good demonstration of micro rovers for the exploration of a remote planet. The ARLISS Project was initiated by Professor Bob Twiggs at SSDL, Stanford University and his colleagues in 1999, since then a number of university, college, and even high school students have participated from the United States and Japan. (A number of the participated students is grater from Japan.) In 2001 "Come-Back Competition" was initiated, in which participants challenge to maneuver the payload to reach a goal marked on the ground. Various approaches to attain the goal are allowed, such as performing the aerodynamic maneuver in the sky, or the surface locomotaion after the landing, or combining these. However, the requirements say the payload has to fit in the specified size and weight of CanSat or Open class, and to be navigated autonomously. The competition has brought us another high-level of goal worth challenging and being involved and excited. The participating institutions from Japan form an organization named University Space Engineering Consortium (UNISEC.) The UNISEC aims to support student based activities of space development, including the ARLISS project, a project named CubeSat, and a US-Japan symposium called USSS. |
|
2. Challenge to the 2002 Come-Back Competition from Tohoku University |
|
A group of students from Space Robotics Lab, Tohoku University challenged the 2002 Come-Back Competition, held in Black Rock, Nevada, August 2-4. Unlike aerodynamic "Fly-Back" approach that was taken by most of other participants, we took "Run-Back" approach reflecting our background technology of robotics for the lunar/planetary exploration. Our challenge is to develop a payload that makes successful soft landing, then autonomously travels over the surface of the desert to the goal. The key issues in the development are listed in the following three points:
The launch and payload ejection were beautiful. (Movie 5.9M) But the parachute did not open, then the payload performed the ballistic free-fall for 3000 meters and resulted in hard landing! The payload was found on the ground with making a small crater. However, its mechanical components received almost no damage, while electric components which were exposed on the outer surface of the main frame, were seriously damaged. Surprisingly, the fragile mechanical components, to which we paid special attention, survived in a good shape. This turned out a good proof and an unexpected success of our mechanical design and fabrication. On the following day of the launch and hard landing, after a minor maintenance of the hardware and backup replacement of electric components, long-distance navigation was tested by the flight hardware. The GPS navigation demonstrated a good performance to track a given direction in a total traveling distance of more than one kilometer. (Fig.4, Movie 7.6M) We will challenge the 2003 ARLISS Come-Back Competition with the same approach and payload design, with some refinement based on the lessons learned from the experience of this year. And of course, WIN the competition! |
 |
 |
|
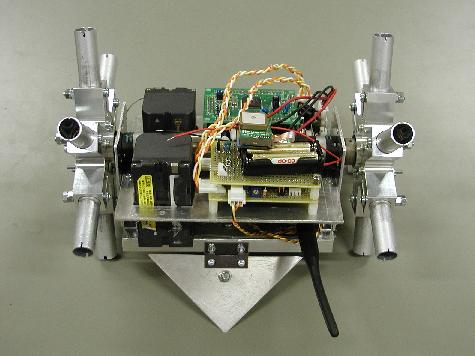
Figure 1: System overview (front)
|
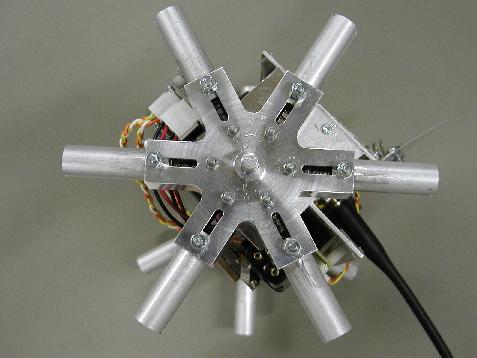
Figure 2: System overview (side)
|
 |
|
|
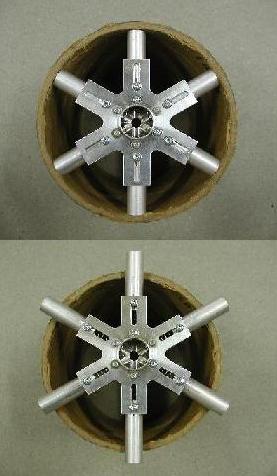
Figure 3: Expandable wheel
|
Figure 4: Surface locomotion
|
 |
|---|
