Welcome to ETS-7 experiments of Tohoku Univercity
Japanese
Academic Experiments Carried Out
on ETS-VII Japanese Flying Space Robot
|
|---|
The Paper Presented at
The 2001 IEEE International Conference on Robotics and
Automation
Received the Best Conference Paper Award
|
|---|
The Engineering Test Satellite VII (ETS-VII, Fig. 1), developed and launched by
National Space Development Agency of Japan (NASDA, currently JAXA) in November 1997,
is the world-first free-flying space robot. A number of exciting orbital robotics experiments,
including rendezvous, docking, manipulation, berthing, ORU exchange, fuel transfer, structure assembling,
were successfully demonstrated using its autonomous capability and/or teleoperation from the
ground station (the round-trip time delay was 5-7 seconds including data relay satellites and computer networks) [1][2].
After it had completed all the scheduled mission prepared by the space agency by the end of May 1999,
the opportunity was opened for additional experiments for advanced academic research.
Selected for this unique and precious opportunity, two research groups
of Tohoku University conducted exciting flight experiments. The
group led by Professor Yoshida demonstrated the manipulator operation to
minimize the reaction to the base satellite attitude and also the
manipulator operation with respect to the inertial space. The ETS-VII has a 2
meter-long 6 DOF manipulator arm on its 2.5 ton unmanned satellite
base. As the inertia of the manipulator arm is relatively large, its
reaction to the base is not negligible for a proper attitude
control. As a version of coordinated control between the manipulator and the base, Prof. Yoshida et al. proposed
special maneuver called "Reactionless Manipulation [3][4]," which was
verified to yield almost zero attitude disturbance during the
point-to-point operation of the onboard manipulator arm.
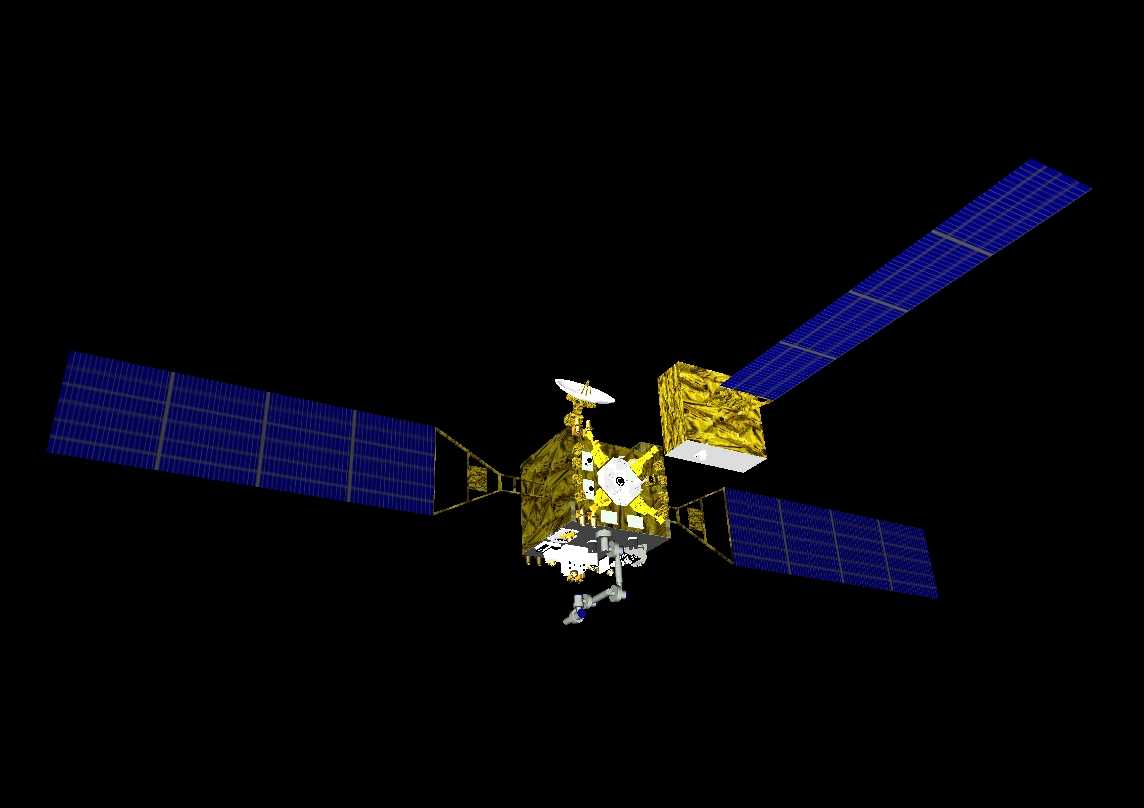
Fig.1 The ETS-VII, a Japanese
free-flying space robot in orbit
For the capture of a free-floating target, such as a malfunctioning satellite or a piece of space debris, the
manipulator has to be operated in the inertial frame, not in the
satellite based frame that can be altered due to the manipulator reaction.
To cope with this issue, the Generalized Jacobian Matrix (GJM) based inertial manipulation was
theoretically proposed in 1987 [5] and 1989 [6],
and this technology was also verified by the
ETS-VII flight experiments.
A continuous whole sequence to capture a
target satellite was not demonstrated although*, key technologies
including rendezvous and precise proximity flight control with the
target, visual servo-tracking and the GJM based inertial manipulation
toward a specific capture point, and berthing operation after the
capture, were all tested separately by ETS-VII, which will open a
solid way to future satellite servicing (Fig.2).
The above results were published in the International Journal of Robotics Research [7].
The other group of Tohoku University, led by Professor Uchiyama,
demonstrated teleoperation with a predictive display using computer
graphics and a special haptic device to provide virtual force feeling
to an operator [8]. Also a group of Kyoto University, led by Professors Yoshikawa and Yokokoji,
demonstrated a bilateral teleoperation under 7-s time delay condition [9].
* Note: a target capture experiment was conducted in the situation that the target satellite (Orihime, left in Fig.2) was freely floating but confined in the space of a half-released docking connector of the chaser satellite (Hikoboshi, right in Fig.2) [2]
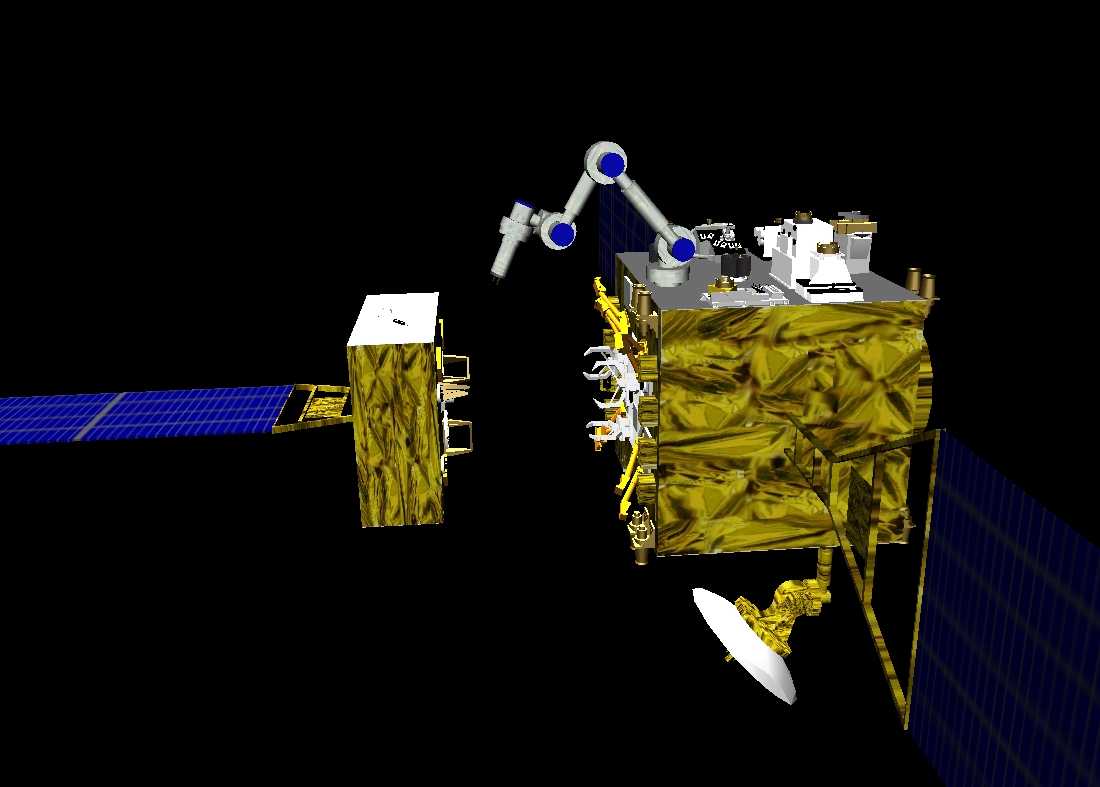
Fig.2 Computer graphics simulation for the target capture by
the manipulator arm by integrating technologies verified by ETS-VII
[1] M.Oda, et al., "ETS-VII, Space Robot In-Orbit Experiment Satellite", Proc. of 1996 IEEE Int. Conf. on Robotics and Automation, pp. 739-744, 1996.
[2] N. Inaba and M. Oda, "Autonomous Satellite Capture by a Space Robot
- world first on-orbit experiment on a Japanese Robot Satellite ETS-VII," Proc. of 2000 IEEE Int. Conf, on Robotics and Automation, pp. 1169-1174, 2000.
[3] K. Yoshida, D. N. Nenchev and M. Uchiyama, "Moving base robotics
and reaction management control," Robotics Research: The Seventh
International Symposium, Ed. by G. Giralt and G. Hirzinger, Springer
Verlag, pp. 101-109, 1996.
[4]
D. N. Nenchev, K. Yoshida, P. Vichitkulsawat amd M. Uchiyama,
"Reaction null-space control of flexible structure mountedmanipulator systems,"
IEEE Transactions on Robotics and Automation, Vol.15, No.6, pp.1011-1023, 1999.
[5] Y.Umetani and K.Yoshida, "Continuous Path Control of Space
Manipulators Mounted on OMV," Acta Astronautica, Vol.15, No.12,
pp.981-986, 1987.
[6] Y.Umetani and K.Yoshida, "Resolved Motion Rate Control of Space Manipulators with Generalized Jacobian Matrix," IEEE Transactions on Robotics and Automation, Vol.5, No.3, pp.303-314, 1989.
[7] K. Yoshida "Engineering Test Satellite VII Flight Experiments For
Space Robot Dynamics and Control: Theories on Laboratory Test Beds Ten Years Ago, Now in Orbit,"
International Journal of Robotics Research, Vol.22, No.5, pp.321-335, 2003.
[8] W-K. Yoon, T. Goshozono, H. Kawabe, M. Kinami, Y. Tsumaki, M. Uchiyama, M. Oda and T. Doi, "Model-Based Space Robot Teleoperation of ETS-VII Manipulator," IEEE Transaction on Robotics and Automation, Vol. 20, No. 3, pp. 602-612, 2004.
[9] T. Imaida, Y. Yokokohji, T. Doi, M. Oda, and T. Yoshikawa, "Ground-Space Bilateral Teleoperation of ETS-VII Robot Arm by Direct Bilateral Coupling Under 7-s Time Delay Condition," IEEE Transaction on Robotics and Automation, Vol. 20, No. 3, pp. 499-511, 2004.
Related Documents
-
JAXA's website on ETS-VII
-
Presentation on the experimental results (PDF file 1.4M)
-
"Space Robot Dynamics and Control: To Orbit, From Orbit, and Future,"
Kazuya Yoshida, Robotics Research, The Ninth International Symposium,
Eds, J.M. Hollerbach and D.E.Koditschek, pp.449-456, Springer, 2000.
(preseneted at the 9th ISRR, Snowbird, UT, Oct. 1999)(PDF file 213K)
-
AWARD WINNING PAPER
(in English)
"Zero Reaction Maneuver: Flight Validation with ETS-VII Space
Robot and Extension to Kinematically Redundant Arm,"
Kazuya Yoshida, Kenichi Hashizume and Satoko Abiko,
Proceedings of the 2001 IEEE
International Conference on Robotics and Automation,
Seoul, Korea, pp.441-446.
-
AWARD WINNING PRESENTATION
(in English)
(WWW links to movie files and other pages are implemented.)
"Zero Reaction Maneuver: Flight Validation with ETS-VII Space
Robot and Extension to Kinematically Redundant Arm,"
Kazuya Yoshida, Kenichi Hashizume and Satoko Abiko,
Proceedings of the 2001 IEEE
International Conference on Robotics and Automation,
Seoul, Korea, pp.441-446.
-
AWARD WINNING PAPERS
(in Japanese)
宇宙ロボットの多腕協調制御
(1993年日本ロボット学会論文賞)
ETS-VII を用いた宇宙ロボット制御実験
(2004年日本航空宇宙学会論文賞)
Movie Archive
Japanese Page is HERE
Lunar/planetary rovers
Future lunar misson
Japanese robot manipulator (JEMRMS) to be mounted on ISS
"Hayabusa"'s asteroid sample-retrun technology
Goto TOP of the lab. (In Japanese)
(c) The Space Robotics Lab, Tohoku University, JAPAN
All right reserved.
For any question, please contact here.