ETS-VII における軌道上実験
Flight Experiemnts on ETS-VII
|
|---|
ETS-VII の基本ミッションが1999年5月末をもって成功裏に終了した後, 軌道上実験の機会が大学等の研究機関にも開かれました.私たちは, この機会を最大限に活用するため実験提案を行い,1999年9月30日に 実験を行う機会を得ることができました.
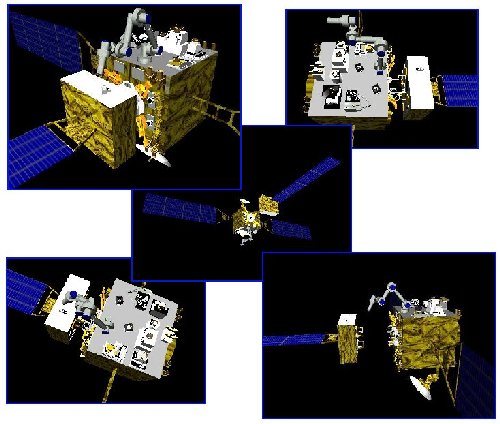
本実験では,軌道上を飛行する宇宙ロボットシステムのアームと衛星姿勢の ダイナミクスに着目し,以下の4点について軌道上実証をすることを目的 とします.
1.反動ゼロ空間に基づく衛星の姿勢に外乱を与えないマニピュレーション
2.非ホロノミック軌道計画法に基づくアームと衛星姿勢の最終値制御
3.一般化ヤコビ行列を基づくアーム先端を慣性系に対して軌道追従させる制御法
4.衛星姿勢にバイアス値を持たせることによりアーム反動による姿勢変動を
小さくする協調制御法
以上の各制御法はこれまでに理論的研究がなされ,学会等において広く議論されて きたものです.宇宙ロボットのフライト実験というこの貴重な機会を利用させて いただいて上記の各種制御法を実際に検証することは,この分野の研究者にとって 長年の願望であり,またその成果は学問的発展および将来の実用アプリケーションの 開発に大きく寄与することが期待されます.
- NASDA ETS-VII のホームページ
- 同上より当日の実験計画
- 実験提案書(word 文書, 50K)
- 実験手順書(Excel ファイル, 27K)
- 実験成果概要の要約(PDF ファイル, 200K)
- 詳細プレゼンテーション(PDF ファイル, 1.4M)
-
"Space Robot Dynamics and Control: To Orbit, From Orbit, and Future,"
Kazuya Yoshida, Robotics Research, The NInth International Symposium, Eds, J.M. Hollerbach and D.E.Koditschek, pp.449-456, Springer, 2000. (presneted at the 9th ISRR, Snowbird, UT, Oct. 1999)(PDF file 213K) -
"Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically Redundant Arm,"
Best Conference Paper Award at 2001 IEEE ICRA
Kazuya Yoshida, Kenichi Hashizume and Satoko Abiko, Proceedings of the 2001 IEEEInternational Conference on Robotics and Automation, Seoul, Korea, pp.441-446, 2001.
- 宇宙ロボットの多腕協調制御 (1993年日本ロボット学会論文賞)
動画集
-
実験のためのマニピュレータ動作 (mpeg movie 1.4M)
- NASDA 筑波宇宙センター ETS-VII 運用室での実験中の様子 (mpeg movie 2.5M)
-
本実験の成果をもとに想定しうる衛星捕獲制御のシミュレーション
(mpeg movie 0.9M)
以上のコンピュータグラフィクス(静止画,動画とも)は,東北大学の 筆者の研究室において作成されたものです.
English Page is HERE
(c) The Space Robotics Lab, Tohoku University, JAPAN
All right reserved.

研究室ホームページ
月面探査ミッションへの取り組み
ロボット探査の解説記事
お問い合わせは,こちら まで.