図1
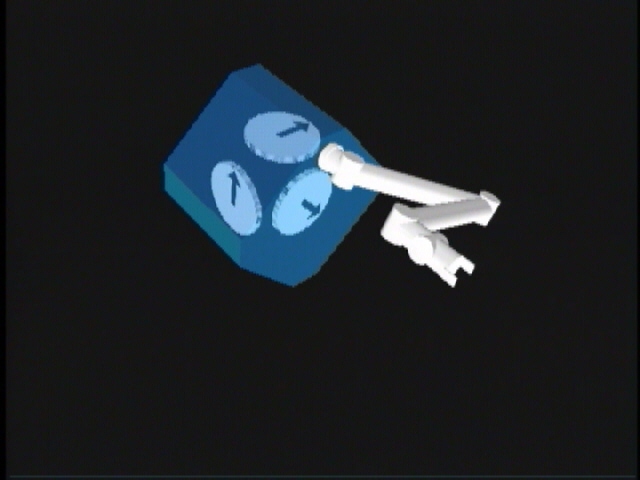 図2
図2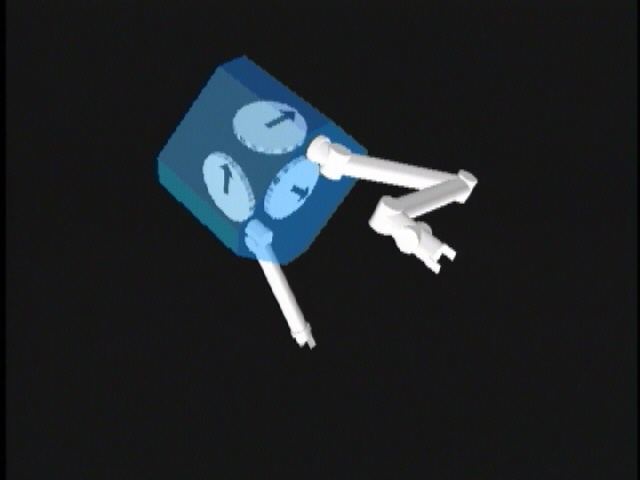 図3
図3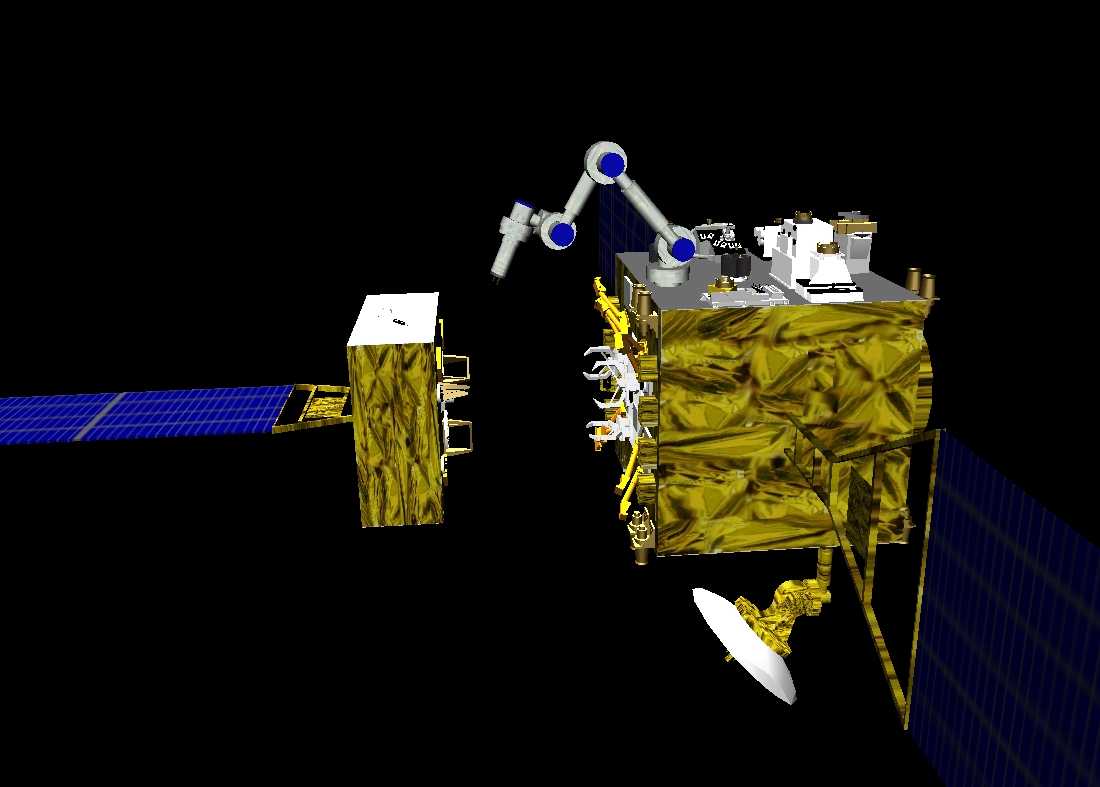
1993年 日本ロボット学会論文賞受賞
図1
図2
図3
論文
吉田,倉爪,梅谷:
宇宙ロボットの多腕協調制御(スタビライジングアームの利用による 制御トルクの最適化),
(PDF, 0.98MB)
日本ロボット学会誌,第9巻6号,pp.718-726, 1991.
関連研究論文
[1] Yoji Umetani and Kazuya Yoshida, "Continuous Path Control of Space Manipulators Mounted on OMV," Acta Astronautica, vol.15, No.12, pp.981-986, 1987.
[2] Kazuya Yoshida, Dragomir N. Nenchev and Masaru Uchiyama, "Moving base robotics and reaction management control," Robotics Research: The Seventh International Symposium, Ed. by G. Giralt and G. Hirzinger, Springer Verlag, pp. 101-109, 1996. (presented at the 7th ISRR, Munich, Germany, Oct. 1995)
[3] Kazuya Yoshida, "Space Robot Dynamics and Control: To Orbit, From Orbit, and Future," Robotics Research, The Ninth International Symposium, Eds, J.M. Hollerbach and D.E.Koditschek, pp.449-456, Springer, 2000. (presneted at the 9th ISRR, Snowbird, UT, Oct. 1999)
[4] Kazuya Yoshida, Kenichi Hashizume and Satoko Abiko, "Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically Redundant Arm," Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Korea, pp.441-446, 2001.