|
宇宙システム講座
宇宙探査工学分野 [宇宙ロボット研究室] |
|
|
航空宇宙工学専攻・機械知能・航空工学科(航空宇宙コース)
|
|
 |
 |
 |
|
教授 吉田 和哉
よしだ かずや |
准教授 桒原 聡文
くわはら としのり |
助教 宇野 健太朗
うの けんたろう |
 |
 |
 |
| 特任講師 藤田 伸哉 | 特任助教 Mickael LAINE | 助教 Shreya SANTRA |
2021年メンバー一覧はこちら
| - |
|
吉田和哉教授が「険しき星をゆく! ~宇宙ロボットたちの冒険~」
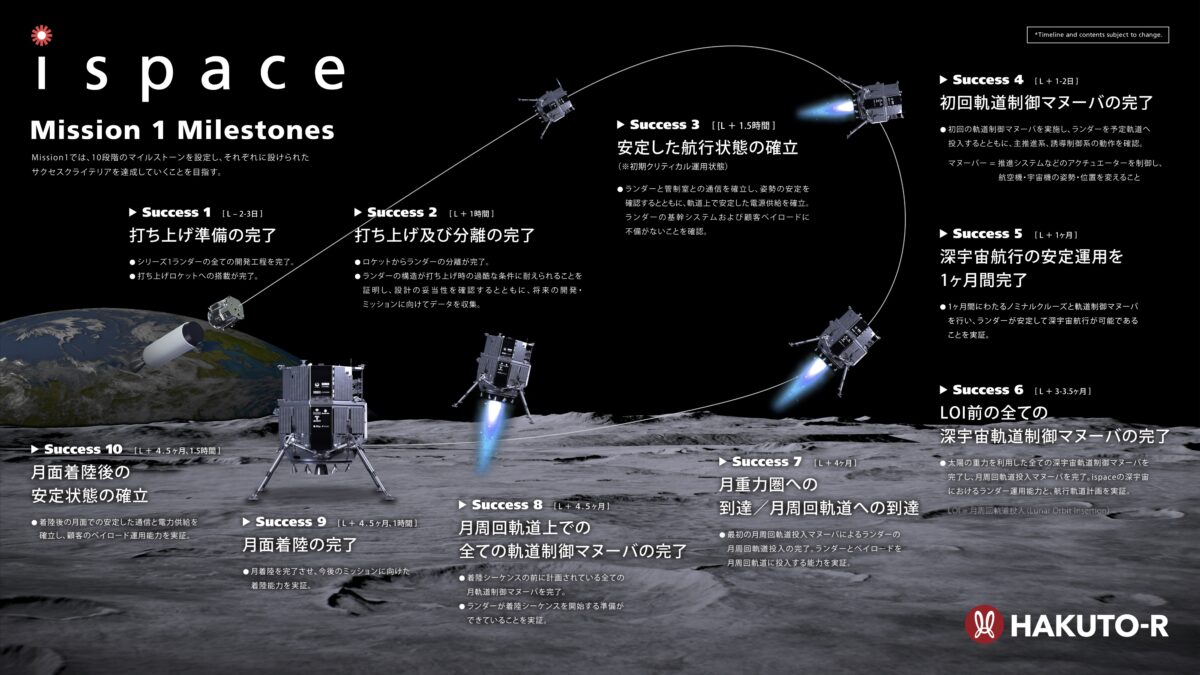
㈱ispaceによる 同ランダーは、ロケットからの切り離し後、安定した飛行状態の確立、搭載機器の健全性の確認、および初回軌道制御マヌーバー(ランダーに搭載した推進系を用いた軌道修正)の各マイルストーンを完了し、月に向けて順調に飛行中です。 株式会社 ispace は、吉田和哉 教授の月面探査ロボットの研究成果をベースにローバー開発に取り組んでおり、2010年に創業された宇宙スタートアップです。グーグル・ルナ・エックスプライズへの挑戦を経て、2017年からはランダー(月着陸船)の自社開発を行ってきました。ミッション1ランダーの月面着陸が成功すれば、民間企業としては世界初の快挙となることが期待されます。 同ランダーの運用・管制は、東京日本橋にあるispaceのミッションコントロールセンター(MCC管制室) より行われており、管制室では吉田・桒原研の卒業生もispaceのエンジニアとして日々の運用に参加しています。
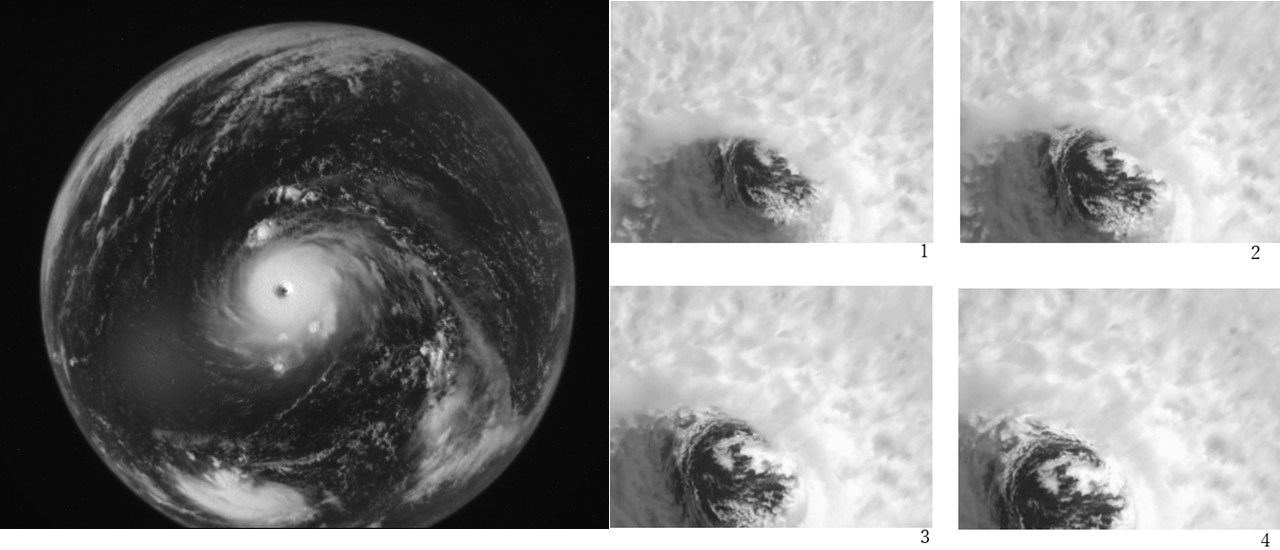
◆ 吉田和哉教授が参加する民間月面探査チーム「HAKUTO」が ●最新情報は、こちらからどうぞ! ●Google Lunar XPRIZEは2018年3月末をもって、 ◆ 当研究室では超小型衛星の開発に取り組み、2009年に第一号機となる「雷神」を打上げて以来、2019年までの10年間に計10機の超小型衛星を開発し、 ◆ NEWS: 北大・東北大共同開発のフィリピン共和国第2号衛星「DIWATA-2」が台風11号の目の撮影に成功しました!
◆ ●超小型人工衛星技術研究開発グループの活動については、 ●フィリピンのPhl-Microsatプログラムについては、 ◆ 吉田和哉 教授が、Moon Shot Episod 5 と題した
上記画像をクリックすると動画(Youtube)が始まります。 ◆ 吉田和哉 教授が、仙台で開催されたTEDxTohokuにて
詳しくはこちらをご覧ください。(2014年10月12日) ◆
◆ ◆ ●吉田和哉 教授に関する最新情報は、 ●吉田和哉 教授の研究業績は、 ◆ |
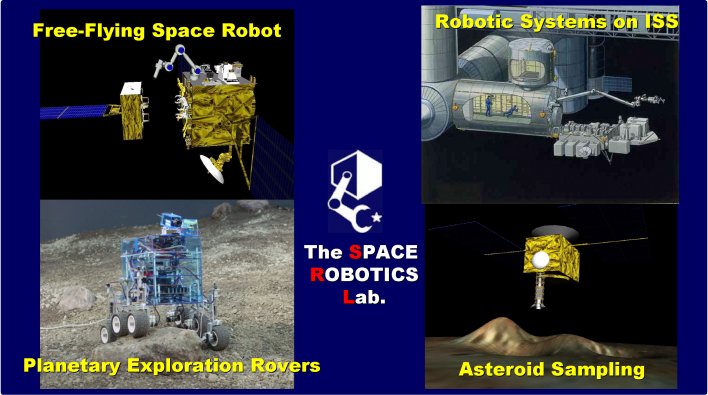
宇宙機・ロボットの機構,ダイナミクス,制御の研究を通して 宇宙探査に必要な技術開発を進めています. |
本研究室では,軌道上の宇宙ロボットや惑星を探査するロボット(宇宙探査ロボット)のダイナミクスと制御の研究を行っています.宇宙環境で動作するロボットの力学を解明し,新しい機構や制御法を開発しています.宇宙航空研究開発機構(JAXA)を中心に進められているわが国の宇宙開発ミッションにも深くかかわっています.また大学主導型の小型衛星の開発を目指しています.さらに宇宙開発で培った技術を,防災ロボットなど地上で求められている技術へ応用することにも,積極的に取り組んでいます. |
| - |
 |
| - |