|
原発事故対応ロボットの開発に力を注いでいます!
当研究室は「極限ロボティクス」の技術を、今回の大災害に学び、次に備える技術として社会に役立てることを目指して、
全力で取り組んでいます。
◆
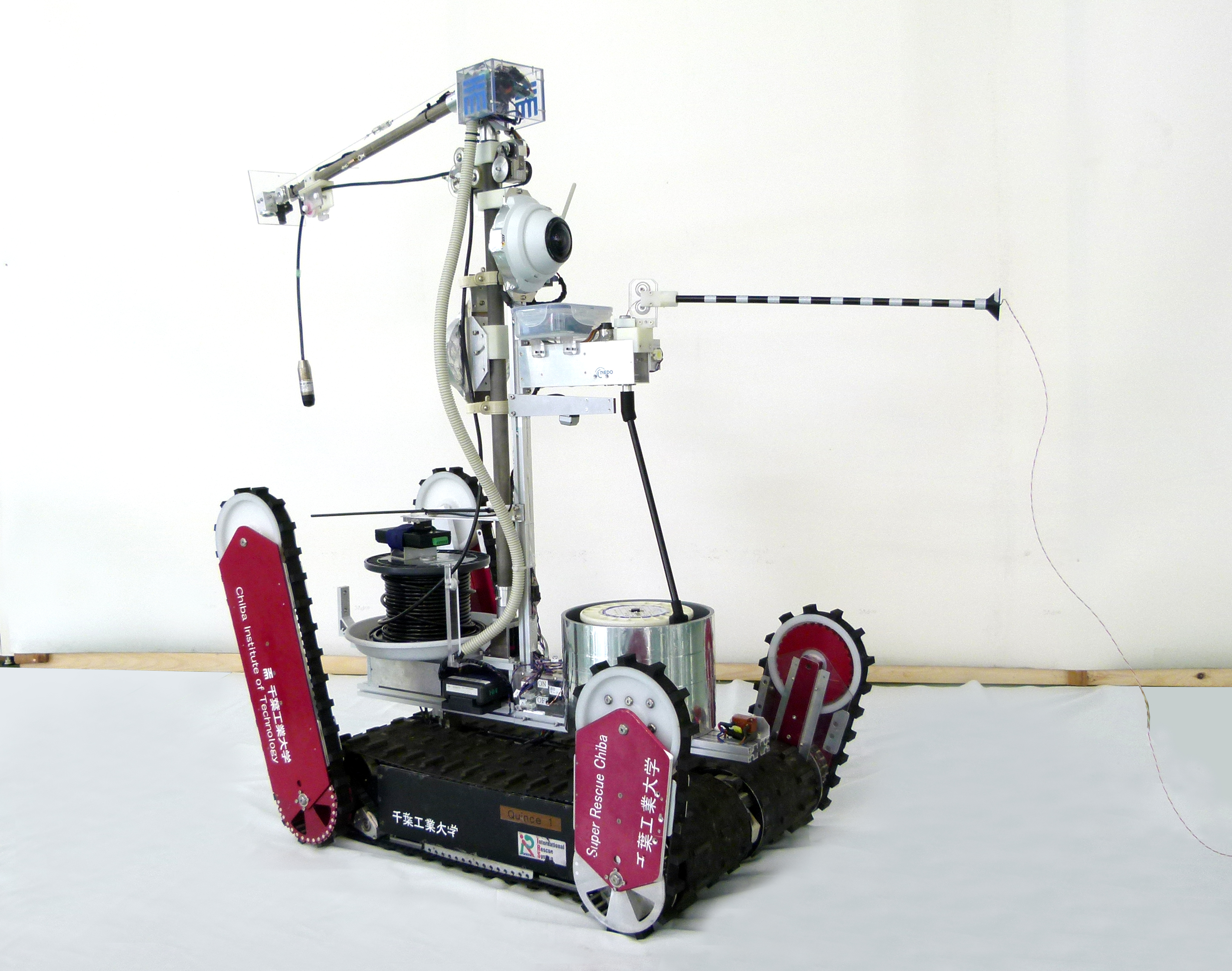
当研究室は、国際レスキューシステム研究機構、千葉工業大学、東北大学を中心とするグループの一員として、CBRNE災害((化学(Chemical)、生物(Biological)、放射性物質(Radiological)、核(Nuclear)、爆発物(Explosive))の際に、消防等の隊員に代わって現場に進入し状況調査を行うためのロボットを目指して、「Quince(クインス)」の研究開発を進めてきました。
福島原子力発電所の事故に対する緊急対応として、震災発生以来「Quince(クインス)」の福島対応モデルの開発・整備に全力で取り組んでいます。
●「Quince(クインス)」福島原子力発電所内での活動状況(4)
(2011.10.21. 東京電力発表)
●「Quince(クインス)」福島原子力発電所内での活動状況(3)
(2011.9.28. 東京電力発表)
●「Quince(クインス)」福島原子力発電所内での活動状況(2)
(2011.7.26. 東京電力発表)
●「Quince(クインス)」福島原子力発電所内での活動状況(1)
(2011.7.19. 東京電力発表)
●「Quince(クインス)」福島原子力発電所に向けて搬出
(2011.6.20. 千葉工業大学発表)
●福島原子力発電所緊急対応ロボット開発の状況(3)
(2011.6.16. 千葉工業大学発表)
●福島原子力発電所緊急対応ロボット開発の状況(2)
(2011.6.8. 千葉工業大学発表)
●福島原子力発電所緊急対応ロボット開発の状況(1)
(2011.5.9. 千葉工業大学発表)
●東日本大震災 福島原子力発電所緊急対応ロボット開発について
(2011.4.5. 東北大学田所研究室発表)
◆
●学術コミュニティーの対応
日本ロボット学会「東日本大震災関連委員会」(3月29日発足)
超学会組織「対災害ロボティクス・タスクフォース」(3月31日発足)
●超学会組織「対災害ロボティクス・タスクフォース」
http://roboticstaskforce.wordpress.com/
http://twitter.com/roboticsTF
http://www.robonable.jp/news/2011/04/wo.html
●日本ロボット学会 東日本大震災関連サイト
●東日本大震災及びそれに伴う福島原子力災害に対する日本のロボット技術の適用に関する声明
◆
●2011年8月4日 東北大学東京分室内会議室において、IEEE 記者セミナー「日本のロボット利用に関する現状と課題 〜福島第一原発における災害用ロボット活用事例から読み解く〜」が開催されました。
●「IEEEが見る、日本のロボット事情と世界のロボット事情」
(2011.8.12. マイコミジャーナル)
●「日本のロボットは福島原発で活躍できない」
(2011.8.6. レスポンス(response.jp))
●「国産ロボット Quince、震災発生直後は活動機会なし」
(2011.8.11. レスポンス(response.jp))
●「Quince 福島原発活動記録---水位計設置失敗は東電のミス」
(2011.8.12. レスポンス(response.jp))
◆
●ロボットの放射線耐性についての見解
「放射線環境では、特に対策が施されていない一般の電子機器は誤動作し、ロボット等が適切に制御できなくなる危険性がある、よって、ロボットの現場投入は容易ではない。」というコメントを数多く見かけますが、これは必ずしも正しくありません。
私たちは、超小型衛星や宇宙探査ロボットのフライトモデルの研究開発に挑戦してきた中で、民生用電子機器の耐放射線特性の評価もおこなってきました。
その結果、ガンマ線の総被ばく量(total dose)に関しては、特別な防護を施さなくても 50[Gy] (= 50[Sv]) 程度までは耐えられるとの見解に至っています。この値は、現場作業員の許容量(100~250mSv)の200~500倍です。
また、日本原子力研究開発機構(JAEA)のご協力を得て、2011年4月15日と4月20日の両日にわたって、高崎量子応用研究所にて、福島原発に向けて準備中のロボットQuinceの搭載電子機器の被曝実験を行いました。その結果、CPUボードやカメラは、200 [Gy] のガンマ線総被ばく量を与えても壊れないことを確認しました。詳しくは、こちらのレポート(PDF)の添付2にて報告しています。
作業をしている方々の被ばく量を減らすため、ロボットが有効活用されることを願っています。
●日本の対災害ロボットの耐放射性についての見解(2011.4.10)
●耐放射線性評価と管理方法の基本的な考え方(2011.4.27)
◆
「国産クインスで原発事故収束を」
(『週刊新潮』 2011年6月16日号
)
◆
◆ニュース一覧に戻る◆
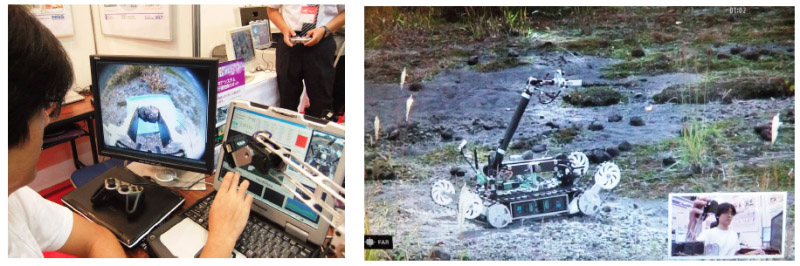
災害対応ロボットに関する日米共同実験をおこないました!
7月28日~31日、米国ペンシルベニア大の Prof. Vijay Kumar および Dr. Nathan Michael の研究グループが来日し、地上走行型と飛行型の災害対応ロボットを組み合わせ、被災建物内をくまなく探査する共同実験を行いました。
実験は東日本大震災で損壊した東北大電気系1号館で実施しました。東北大や千葉工大などでこれまで開発してきた地上走行型「クインス」の上に、ペンシルベニア大の超小型飛行ロボット「ペリカン」を搭載し、建物内の状況把握する性能についての基礎実験を行いました。
同実験は、米国国立科学財団(NSF)と日本の科学技術振興機構(JST)の連携による「国際緊急共同研究・調査支援プログラム(J-RAPID)(Grants for Rapid Response Research)」の支援を受け、東北大学側では、「極限ロボティクス国際研究センター」の田所教授、永谷准教授が中心となって実施されました。
また、7月29日には、Prof. Vijay Kumar による
Autonomous 3-D Flight and Cooperative Control of Multiple Micro
Aerial Vehicles
と題した特別講演会を、8月1日には、Dr. Nathan Michael による
Micro-Aerial Vehicles with Applications Toward Disaster Response
と題した特別講義を実施しました。
実験の詳しい内容については、下記の報道等をご参照ください。
●
「走行・飛行災害ロボが合体 被災建物内をくまなく探査」
(河北新報 2011年8月4日)
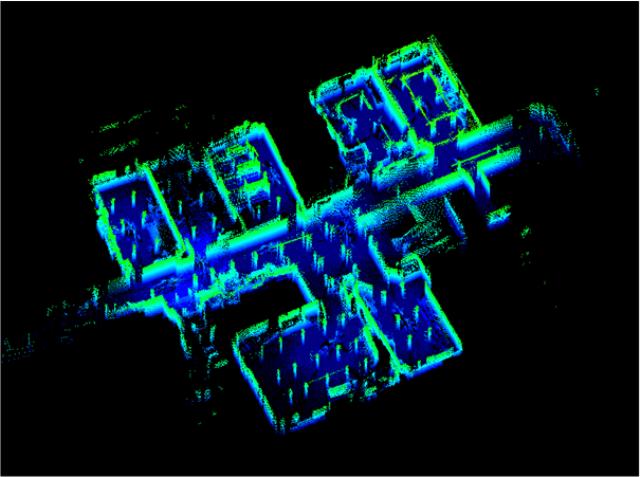
●「東北大、クローラ型と飛行型ロボで被災建物の3次元地図の生成に成功」
(日刊工業新聞ロボナブル,2011年8月2日)
●災害対応ロボットによる被災状況調査の共同実験報告会の案内
(東北大学プレスリリース,2011年7月29日)
◆ニュース一覧に戻る◆
獨協大学「天文・宇宙Week」にて吉田教授が「探査ロボットの技術開発と使命」と題する講演を行いました!
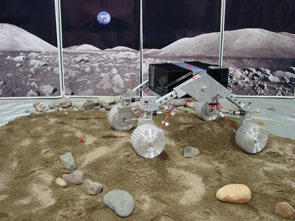
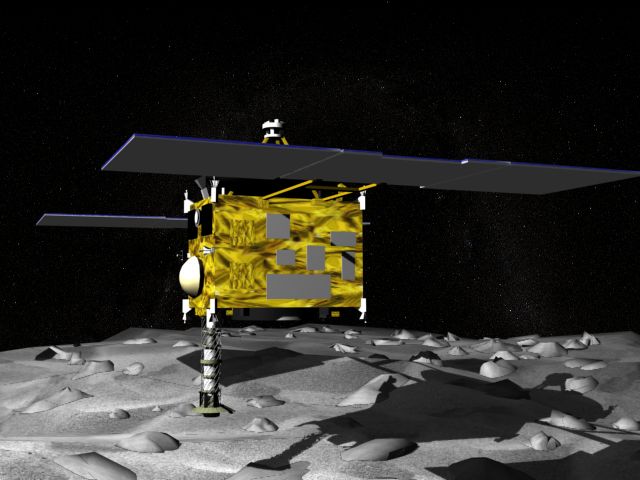
2011年5月19日~23日、獨協大学にて「天文・宇宙Week」が開催され、小惑星探査機「はやぶさ」のカプセル展示や、「はやぶさ」「天文」「宇宙」に関する講演会・シンポジウムが開催されました。
吉田教授は、5月22日午後に「探査ロボットの技術開発と使命」と題する講演を行いました。
■山根一眞氏オフィシャルサイト

(撮影:山根一眞氏)
◆ニュース一覧に戻る◆
東北大学出版会より「マイクロサット開発入門」が出版されました!
 |
『マイクロサット開発入門』
東北大学超小型衛星開発チーム 著 吉田和哉 監修
定価3,675円(税込) A5判
ISBN978-4-86163-159-7 C3053
(2011年4月刊行)
《目 次》
1.まえがき
2.マイクロサットの目指すところ
3.マイクロサットの歴史と現状
4.マイクロサットの開発手順
5.各系の設計
6.システム試験
7.部品・材料選定
8.低価格化手法
9.電池のスクリーニングと充放電
10.マイクロサット特有の事項
11.地上システム
12.あとがき
|
“最近小型衛星の重要性が認識され、多くの大学が数kg級の超小型衛星、50kg級のマイクロサットの開発に挑戦している。しかし小型の衛星と言えども、衛星開発には多岐にわたる技術要素、ノウハウの蓄積が必要であり、一朝一夕に開発できるものではない。
筆者等が科学衛星、マイクロサット開発で得た技術・知識・経験に基づいて設計・製作・試験の基本事項、勘所、テクニックを述べ、さらに鯨生態観測衛星(WEOS)、SPRITE-SAT(雷神)等の設計から運用までの実例を交えてマイクロサットの開発方法について解説している。マイクロサット開発を目指す技術者、学生に良い指針を与える参考書である。”
●ご注文は[東北大学出版会]のページへ!
◆ニュース一覧に戻る◆
東日本大震災(M9.0)が発生しました。
このたびの東日本大震災により被害を受けられました皆様に心よりお見舞い申し上げます。
本研究室も研究機材の一部損傷や棚が倒れるなどの被害がありましたが、
幸いにも研究室に所属しているメンバーは全員無事でした。
4月末までには研究室の片づけもほぼ完了しました。
5月上旬よりひと月遅れの新学期を迎え、新しいメンバーも加わって研究活動を再開しています!
◆ニュース一覧に戻る◆
平成23年度東北大学新規予算「極限ロボティクスの国際研究拠点形成」の内示がありました!
■かねてより提案しておりました下記の概算要求事項に対しまして、平成23年度より新規予算が認められるとの内示がありました。
「極限ロボティクスの国際研究拠点形成」
人間の能力を超えたマクロ( 巨視) の世界およびマイクロ(微視) の世界で活躍する
ロボットの実現を目指す分野であり、世界中から優れた研究者を惹きつける国際研究拠
点を形成し、レスキュー、宇宙探査、環境保全、手術支援、体内ロボットなどの高度実
用化のための学理研究の推進を目指す。
■参考記事:「青葉工業会ニュースレター」
■2011年7月1日:本研究プロジェクトの実施組織として「極限ロボティクス国際研究センター」が発足しました。
◆ニュース一覧に戻る◆
東北大学・読売新聞共同プロジェクト「市民のためのサイエンス講座2010:『はやぶさ』の奇跡の物語」が開催されました。
■主催:東北大学、読売新聞東北総局
■日時:平成22年12月23日(木)13:00~17:00(開場:12:30)
■会場:東北大学百周年記念会館 川内萩ホール
■定員:1,200名
■入場無料
■講座内容
○講 演
川口淳一郎 (JAXA)「はやぶさ」プロジェクトマネージャー
出村 裕英 会津大学コンピューター理工学部
吉田 和哉 東北大学大学院工学研究科
中村 智樹 東北大学大学院理学研究科
○パネルディスカッション
コーディネーター 山根 一眞(「小惑星探査機はやぶさの大冒険」の著者)
◇開催案内のページ◇
川口プロジェクトマネージャーに加え、東北地区で「はやぶさ」につながりのある3人の研究者が、講演を行いました。また、山根一眞氏をコーディネーターとしてパネルディスカッションが行われ、「はやぶさ」の開発や帰還にまつわるエピソードが紹介されました。
川内萩ホールは定員1200人の大きなホールですが、会場はほぼ満席の賑わいとなりました。ご来場ありがとうございました。

◆ニュース一覧に戻る◆
「はやぶさ」功労者に内閣府より感謝状を授与!
2010年12月2日(木)内閣府本府において、『「はやぶさ」功労者感謝状贈呈式』が開催され、「はやぶさ」プロジェクトに参加した各大学、研究機関、企業に、海江田宇宙開発大臣及び高木文部科学大臣から感謝状が授与されました。東北大学からは、大学院工学研究科 吉田和哉 教授(航空宇宙工学専攻)が出席しました。
◇東北大学からのプレスリリース◇

◆ニュース一覧に戻る◆
超高速インターネット衛星「きずな」(WINDS)を使って、東京ビックサイト・浅間山麓間で、不整地探査ロボットQuinceの遠隔制御実験を行いました。
●実験実施日:
2010年10月5日~8日
●実験の概要:
超高速インターネット衛星「きずな」(WINDS)を経由した衛星回線を利用し、浅間山片蓋川に置いた不整地探査ロボットQuinceを東京ビッグサイトの会場から遠隔操縦しました。不整地走行や、ロボットアームによる小石採集などの実験を行いました。
●関連ページ:
遠隔ロボットを用いた災害時マルチメディア情報収集技術に関する研究開発
ロボナブル・先川原室長のロボヤマ話
(ページの下の方に、動画付きで紹介されています。)
●実験結果報告:
高速衛星通信回線を用いた
不整地走行ロボットの遠隔オペレーションの実験(PDF)
◆ニュース一覧に戻る◆
小惑星探査機『はやぶさ』が仙台に来ます!
●2010年10月3日~10月10日
東北大学片平キャンパス・エクステンション教育棟・広報展示スペースにて、「はやぶさ」実物大模型が展示されます!
●サイエンスカフェ・スペシャル版
2010年10月3日(日)16:30~18:30(そのうち18:00~18:30は見学)
会場:片平さくらホール 2階会議室
詳細については,こちらをご覧ください.

◆ニュース一覧に戻る◆
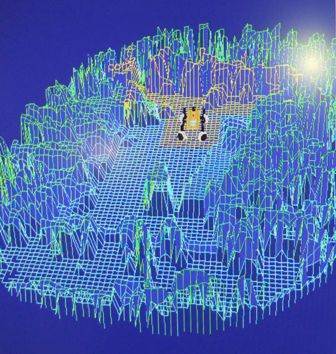
宙博(そらはく)2009にてローバーのデモを行いました.
●実施日・会場:
2009年12月3日(木)~6日(日)・東京国際フォーラム
●概況:
月惑星探査ローバーの研究モデルEl-Dorado-IIを使って、砂場フィールドでの走行と3次元センサによる環境地図作成のデモンストレーションを行いました。特に最終日(12月6日(日))は、非常に多くの方々にご来場いただきました。
◆ニュース一覧に戻る◆
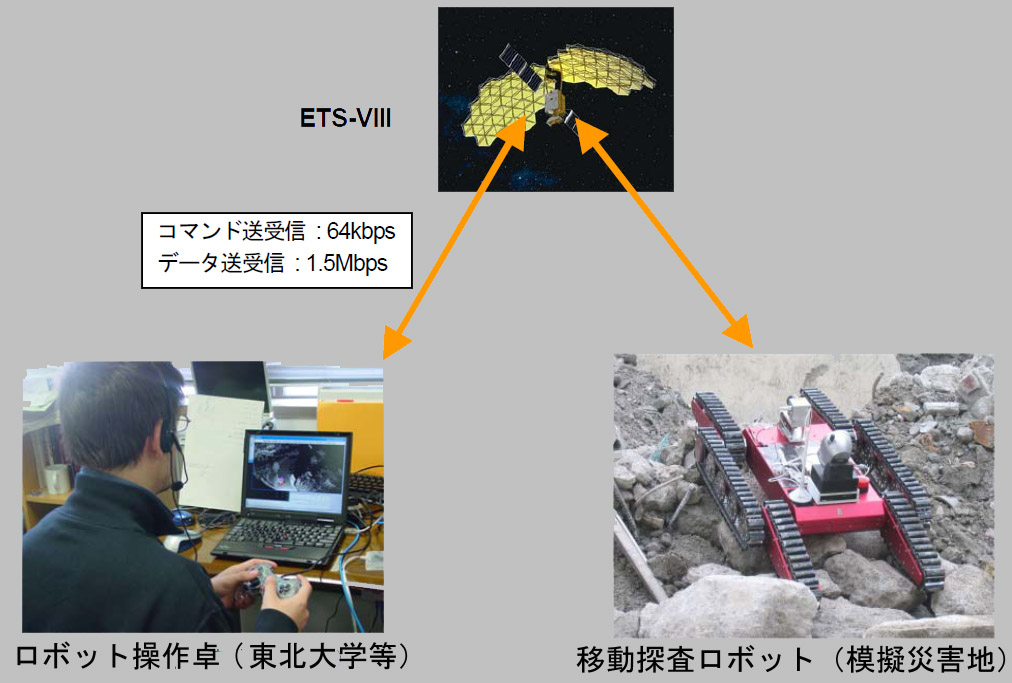
仙台市天文台にて,「人工衛星きく8号を利用した災害救助・不整地走行ロボット遠隔制御技術の実験」と題した公開実験が行われ,新聞,TVにて紹介されました!
●実験実施日:
2009年3月5日~7日
●実験の概要:
東北大学の私たちの研究室と仙台市天文台の間を、通信技術試験衛星ETS-VIII(きく8号)を経由した衛星回線でつなぎ、仙台市天文台の中庭および室内におかれたロボットを遠隔操縦しました。
●関連ページ:
遠隔ロボットを用いた災害時マルチメディア情報収集技術に関する研究開発
●実験結果報告:
災害救助・不整地走行ロボット遠隔制御技術の実証実験(PDF)

◆ニュース一覧に戻る◆
東北大学関西交流会にて「サイエンス・カフェ」が行われました.
大阪で開催された東北大学関西交流会にて,「宇宙開発とロボティクス」と題したサイエンス・カフェを行いました.吉田教授による話題提供の後,来場の皆さんと楽しい討論・交流の場を持つことができました.
●開催日:2009年2月21日(土)
詳細については,こちらをご覧ください.
◆ニュース一覧に戻る◆
特任教授 瀬名秀明と機械系が贈る特別シンポジウム
「FLY TO THE FUTURE 100年先の未来をつくろう!」
が開催されました.
当研究室の永谷准教授が,「東北大学機械系が夢見る未来」の部にて,「フィールドロボット/宇宙ロボットの現状と未来」と題して講演を行いました.
●開催日:2009年1月24日(土)
詳細については,こちらをご覧ください.
●Robot Watchに詳細レポートが掲載されています.
・(前編)~瀬名秀明特任教授が東北大機械系での3年間で描いた
『100年先の未来』へのヴィジョンとは?
・(後編)~東北大学機械系が夢見る未来
◆ニュース一覧に戻る◆
スプライト観測衛星(SPRITE-SAT)の打ち上げに成功しました!
東北大学大学院理学研究科と工学研究科が共同で開発を進めてきたスプライト観測衛星(SPRITE-SAT)が,打上げられました!
・衛星は所定の地球周回軌道に投入され,「雷神」(RISING)と名づけられました.
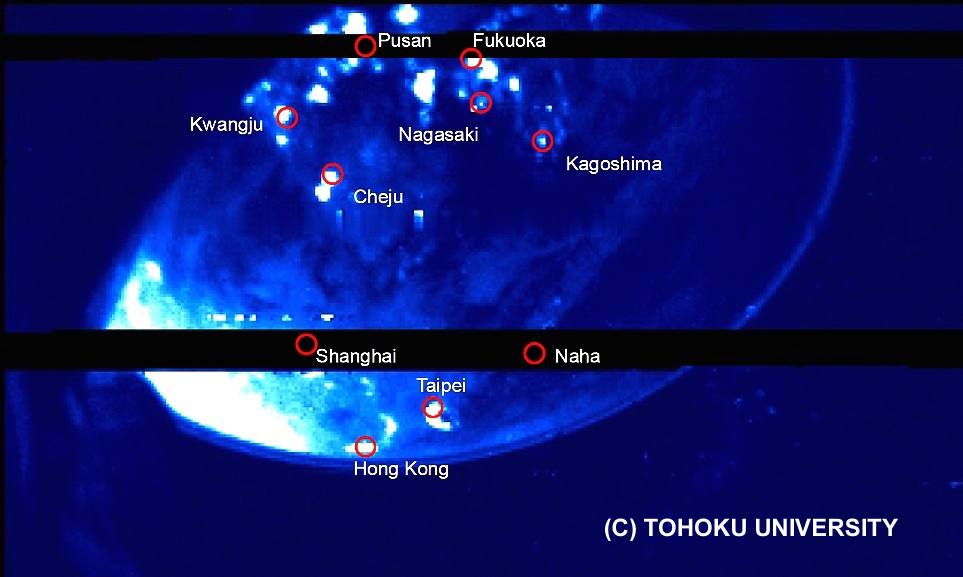
●2009年2月20日 「雷神」が撮影した地球夜景の写真を公開します.
・写真の詳細および衛星の運用状況については,こちらをご覧ください.
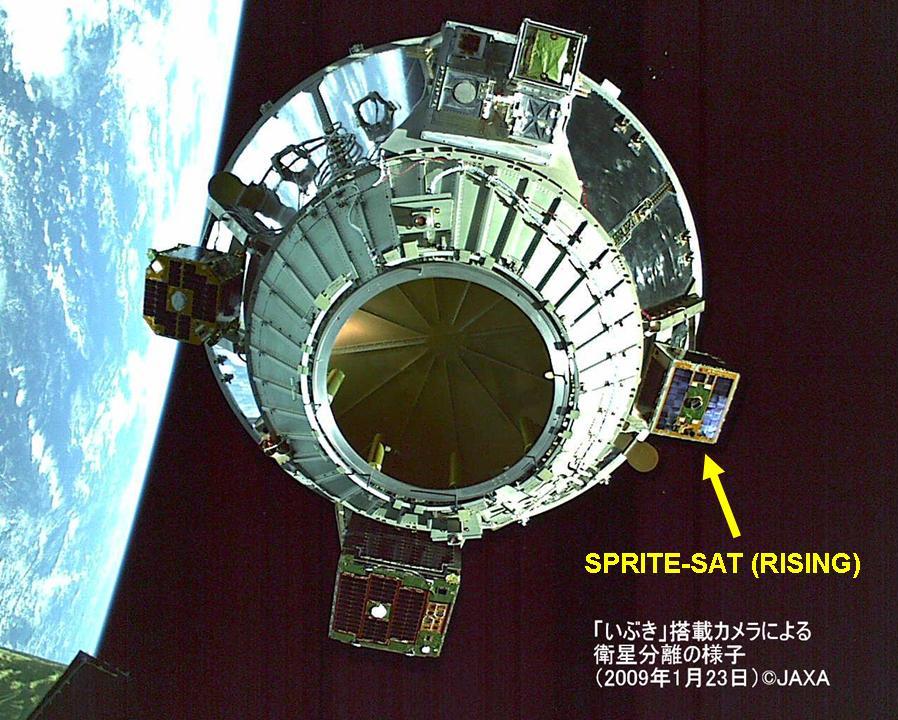
●2009年1月23日 12:54:00
・H-IIAロケット15号機により,JAXAの温室効果ガス観測技術衛星「いぶき」(GOSAT)とともに打上げられました.
・JAXAによる打上げカウントダウンのページは,こちら
・相乗り衛星の概要(by JAXA)は,こちら
・打上げ当日には,仙台市天文台にて,JAXAより配信される種子島宇宙センターからのライブ中継を受信し,パブリック・ビューイングが行われました.
●2009年1月4日〜2月1日
・仙台市天文台(エントランスホール)にて「宇宙に飛ばそう私の絵画」入選作品展を行いました.
●2008年12月26日
・衛星がロケットインターフェース部に取り付けられました.
 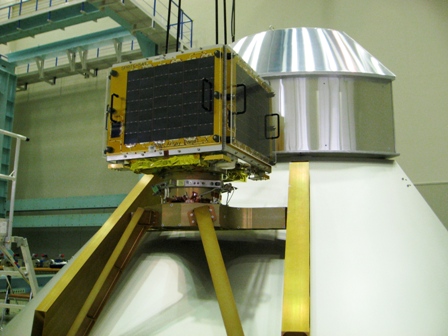
写真左:相乗り衛星取り付け部分の概要(by JAXA)
写真右:筑波宇宙センターでのフィットチェック試験時に撮影
●2008年12月16日〜25日
・専用トラックに載せられた衛星は,鹿児島より海を渡り,12月16日に無事に種子島宇宙センターに到着しました.その後,12月19日まで東北大メンバーによる動作チェックが行われました.
・12月23日には安全審査が行われ,ロケットへの組み付け作業へと進んでよいとの判定をいただきました.これを受けて,12月24日には,衛星はフェアリング組み立て棟(SFA)と呼ばれる建物に移送されました.
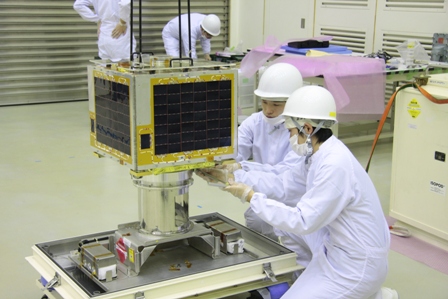  
写真左:種子島での衛星搬入作業(by JAXA広報部)
写真中:最終点検(2008年12月19日)
写真右:点検作業終了後の記念撮影(2008年12月19日)
●2008年12月13日
東北大学仙台セミナー「そらからの贈りもの〜宇宙航空の最先端を知る〜」が開催され,高橋講師(理学研究科)および吉田教授より,スプライト観測衛星の紹介がなされました.(下記参照)
●2008年12月12日
・衛星を種子島宇宙センターに向けて送り出しました.あわせて記者発表を行いました.
 
写真左:衛星コンテナの搬出 写真右:記者会見の様子
●2008年9月〜11月
・JAXAの設備(筑波,東大阪)にて,ロケット搭載のための適合性確認試験が行われました.
12月1日にはJAXAにて審査会が行われ,「適合性確認試験に合格」との判定をいただきました.
●2008年8月31日
・衛星の組み立てが完了しました! 9月2日には,適合性確認試験のために,筑波宇宙センターへ向けて衛星を送り出しました.
 
◆ニュース一覧に戻る◆
東北大学仙台セミナー「そらからの贈りもの〜宇宙航空の最先端を知る〜」が開催されました.
2008年12月13日(土)に,東北大学百周年記念会館(川内萩ホール)にて,第3回東北大学仙台セミナー「そらからの贈りもの〜宇宙航空の最先端を知る〜」が開催されました.このイベントは東北大とJAXAとの組織的連携協定1周年を記念したものでもあります.約800人の市民の方に来場いただきました.あわせて「宇宙の学校」も開催され,約100名もの小中学生が宇宙をテーマにした体験型科学教育プログラムに参加しました.
●開催日:2008年12月13日(土)
●会 場:東北大学百周年記念会館(川内萩ホール)
●プログラム
13:00- 開会のあいさつ
13:10- 第1部
山崎直子宇宙飛行士からのビデオレター
基調講演 「子どもたちと宇宙〜命の大切さ・好奇心・冒険心・匠の心〜」
宇宙航空研究開発機構技術参与 的川泰宣
14:25- 第2部
「『かぐや』とこれからの月探査」
宇宙航空研究開発機構宇宙科学研究本部教授 加藤 學
東北大学大学院工学研究科教授 吉田和哉
「わくわくする未来の飛行機 〜これからの日本の活躍〜」
宇宙航空研究開発機構技術参与 坂田公夫
東北大学流体科学研究所教授 大林茂
「小型衛星が拓く新しい宇宙時代」
宇宙航空研究開発機構宇宙科学研究本部准教授 澤井秀次郎
東北大学大学院理学研究科講師 高橋幸弘
東北大学大学院工学研究科教授 吉田和哉
16:25- 閉会のあいさつ
●関連リンク
・開催案内
・東北大学広報部
・JAXA大学等連携推進室
・JAXA宇宙教育センター(「宇宙の学校」の様子)
●スプライト観測衛星に関する講演資料(PDF:3.5MB)
当日会場では,月惑星探査ローバーの研究モデルを使った実演も行われました.
 
◆ニュース一覧に戻る◆
仙台市科学館にて吉田教授が「宇宙に届け,私たちの人工衛星!」と題して講演を行いました.
2008年9月7日(日)に,日本航空宇宙学会北部支部主催の
第15回科学講演会「親子のためのロケット公開教室」"作って飛ばそう! ぼく・わたしのロケット"
が開催されました.
講演会ならびにペットボトルロケットの製作・打ち上げ会が行われ,多数の親子連れでにぎわいました.
●開催日:2008年9月7日(日)
●会 場:仙台市科学館
●参加料:無料(要予約)
●人 数:120名(応募者多数の場合は抽選)
●スケジュール:
(12:00〜 受付開始)
13:00〜13:40 講演会
講 師:吉田 和哉 氏(東北大学 航空宇宙工学専攻 教授)
題 目:「宇宙に届け,私たちの人工衛星!」
13:40〜14:50 ロケット教室 製作・講習会
15:00〜16:00 自作ロケットの打ち上げ体験
詳しくはこちらをご覧下さい.
◆ニュース一覧に戻る◆
スプライト観測衛星に搭載する絵画作品の審査会が行われました!
7月31日に締め切られた「宇宙に飛ばそうわたしの絵画」の公募には,計359点もの素晴らしい作品が集まりました.
8月6日に河北新報社にて審査会を行い,入賞11点(最優秀賞1点,金賞3点,銀賞7点),佳作22点を選びました.
入賞11点の作品は,縮小してエンブレム(小型のシリコンプレート)に焼き込み,スプライト観測衛星に搭載されます.
応募いただいた全ての作品は,9月12日(金)〜10月13日(月)の期間,仙台市天文台に展示されます.
みなさまからのたくさんのご応募ありがとうございました!
 
【写真左】: 応募作品359点の全てを大ホールに並べて,審査を行いました.いずれも素晴らしい作品ばかりで難しい審査になりました.どの作品も個性豊かに描かれており,楽しみながら作品を選ぶことができました.
【写真右】: 審査員は左から順に,
高橋幸弘(東北大学大学院理学研究科講師)
林 友直(東京大学名誉教授,宇宙科学研究所名誉教授)
土佐 誠(仙台市天文台台長)
吉田和哉(東北大学大学院工学研究科教授)
小野綾子(スペースアート作家)
瀬名秀明(小説家,東北大学機械系特任教授)
です.(敬称略)
◆ニュース一覧に戻る◆
東北大学オープンキャンパスが実施されました.
2008年7月30,31日の両日に,東北大学オープンキャンパスが実施されました.
私たちの研究室では,日ごろの研究成果の紹介として,軌道上ロボットマニピュレータ,小型衛星開発,高層気球搭載望遠鏡による観測ミッション等に関するプレゼンテーション,およびローバープロジェクトに関するデモ(実演)を行いました.
東北大学機械系のロボティクス関連のオープンキャンパスの様子は,
Robot Watch にもレポートされています.(記事中4番目の話題です.)


◆ニュース一覧に戻る◆
外国人留学生(JYPEプログラム)の送別会を行いました.
【吉田研究室/永谷研究室の留学生事情】
2008年7月29日に,当研究室で1年間を過ごした外国人留学生 Matthew と Stephanie の送別会を行いました.彼らは東北大学の交流協定校からの交換留学生で,Junior Year Program in English (JYPE)と呼ばれる国際交流プログラムに基づき,学部の授業を取りながら,当研究室で研修を行いました.
Matthew はオーストラリア・シドニー大学からの留学生で,将来の宇宙望遠鏡への応用を目指したMEMSミラーによる高精度ポインティング制御の実験を行いました.
Stephanie は米国・コロラド鉱山大学からの留学生で,将来の月面探査ローバーへの応用を目指して,軟弱土壌を走行する車輪型ロボットの接地圧計測の実験を行いました.なお,当研究室・修士1年の須藤君が,2008年10月から1年間の予定でコロラド鉱山大学に留学することになりました.テーマは,月面探査と月面土壌に関する研究です.
また,今年度の夏期はフランスENSEIRB (Ecole Nationale Superieure d'Electronique, Informatique et Radiocommunications de Bordeaux)より2名の大学院学生がインターンシップ生として,当研究室に3ヶ月間滞在し,それぞれ有益な成果を挙げてくれました.彼らの受け入れはDirect Enrollment Education Program (DEEP)と呼ばれる国際交流プログラムに基づいています.
この他に当研究室には,文部科学省奨学金Japanese Government (Monbukagakusho:MEXT) Scholarshipsに採択された国費留学生が3名在籍しています.(Andres: 博士後期課程3年生:コスタリカより,Steve: 博士前期(修士)課程1年生:米国より,Havard: 大学院研究生:ノルウェーより)(学年は2008年10月現在)
ポスドク研究者として,日本学術振興会・外国人特別研究員も1名(Eric, フランスより)が活躍しています.
さらに,2008年10月には米国より学部交換留学生(DEEP)1名 (Christina),中国より博士後期課程学生(中国政府奨学金)1名 (Liang)が加わり,2009年4月からはスウェーデンからの国費留学生(日本政府・文科省)1名 (David)も加わる予定です.
このように,当研究室は非常に国際色豊かな人員構成となっています.
(当研究室への大学院進学を希望する学生の皆さんは,基本的な英会話と英語による研究発表の Skill は必須のものと心得ておいてください.)
◆ニュース一覧に戻る◆
機械工学フロンティアの成果発表会がせんだいメディアテークにて開催されました.
東北大学機械系では,平成19年度より文部科学省の支援を得て,大学院教育を充実させるプログラムを実施しています.大学院修士課程1年生の授業科目「機械工学フロンティア」では,ものづくりを実践しながら,機械工学の最先端に触れ,学生同士で協力してプロジェクト研修を行いました.
2008年7月28日には,せんだいメディアテークにて,平成20年度の活動成果を公開ポスターセッションとして広く一般にも紹介し,実物を使ったデモンストレーションも行われました.
詳しくはこちらをご覧下さい.
「機械フロンティア創成」プログラムについては,東北大学広報季刊誌「まなびの杜」No.45の「大学教育の潮流」欄にも紹介されています.
◆ニュース一覧に戻る◆
サイエンスカフェ 高橋講師がスプライト観測衛星について語りました.
「手作り小型衛星SPRITE-SATで宇宙雷の謎に迫る」
と題して,来場者との間で活発な質疑応答を交えながら,スプライト現象や開発中の
スプライト観測衛星(SPRITE-SAT)について,興味深い話題が展開されました.
●日時:2008年7月25日(金)18:00-19:45
●会場:せんだいメディアテーク 宮城県仙台市春日町2-1
●内容:通常の落雷は雷雲と地上の間の放電現象ですが,1989年に雷雲と宇宙空間の間でも放電していることが発見され,スプライトと名付けられました.
以来,精力的に研究が行われてきましたが,発生メカニズムには未解明な点が多く謎に包まれた現象です.
一方2004年には,遠方宇宙の極限的物理現象と考えられていたガンマ線が,雷放電に伴って大量に起きていることが天文衛星によって明らかにされました.
東北大学では,スプライトや地球起源ガンマ線のメカニズム解明を目指し,理学研究科と工学研究科が協力して50kgの超小型科学衛星SPRITE-SATを製作中です.
順調にいけば2008年度に打上げられ,先進的な宇宙観測が世界に先駆けて実現されます.
たくさんの方々にご来場いただき,ありがとうございました.



写真左:来場者に熱く語りかける高橋講師.中央:会場はほぼ満席でした.
右:会場には衛星の実物大模型も登場しました.
高橋講師プロフィール:
高橋講師は,雷放電からオーロラ,惑星大気まで,地球および惑星における大気とプラズマに関連する発光現象を研究しています.
最近は,地上からの観測に加え,人工衛星や大気球など飛翔体に観測機器を搭載した多くのプロジェクトを推進しており,
金星探査計画でも雷観測器の責任者を務めます.1995年からは落雷に伴って宇宙と地球の間で起こる発光の観測に取り組み,
新現象の発見などで世界をリードしています.
東北大学スプライト研究グループ
◆ニュース一覧に戻る◆
宇宙少年団(仙台たなばた分団) スプライト観測衛星見学会

 
2008年7月6日,宇宙少年団(仙台たなばた分団)の親子連れ30名が開発中のスプライト観測衛星を
間近で見学しました.
分団員のみなさまから,スプライト観測衛星に乗せる「宇宙へのメッセージ」をいただきました.
(メッセージの受付は7月31日にて締め切りました.)
◆ニュース一覧に戻る◆
仙台市天文台特別展にて,スプライト観測衛星の模型が展示されています.

仙台市天文台が2008年7月1日リニューアル・オープンしました!
特別展にてスプライト観測衛星の模型が展示
されています.
仙台市天文台オープニングテーマ特別展
「□(スペース)が見た宇宙」
スプライトサット(スプライト観測衛星)の実物大模型の展示,及び宇宙へのメッセージの応募用紙と応募箱が設置されています.
●天文台での特別展:7月1日(火)〜8月25日(月)
●天文台でのメッセージ応募受付期間:7月1日(火)〜7月31日(木)(受付終了しました)
◆ニュース一覧に戻る◆
戦略的情報通信研究開発推進制度(SCOPE)の成果発表会が行われました.
2008年6月11日,東京大手町にて戦略的情報通信研究開発推進制度(SCOPE)第4回成果発表会が開催され,平成19年度に終了した研究成果が発表されました.私たちの研究室では,「遠隔ロボットを用いた災害時マルチメディア情報収集技術に関する研究開発」と題した研究を,産学官連携プロジェクトとして5年間に渡って実施し,その成果について研究代表者の吉田教授より報告を行いました.
講演の概要は,Robot Watch にも取り上げられました.(記事中2番目の話題です.)
◆ニュース一覧に戻る◆
「瀬名秀明がゆく! シリーズ26」にて「スプライト観測衛星を打ち上げよう!」が特集されました.

雷雲の上に光るふしぎな“妖精”現象を、世界中の誰よりもはやくつかまえる!
このプロジェクトに挑戦する東北大学の面々を「瀬名秀明がゆく!」が徹底取材。
サイエンスとテクノロジーの粋をぜひ感じてください!《構成:瀬名秀明》
この続きは,右の写真をクリックしてください!
◆ニュース一覧に戻る◆
月面探査ローバーの研究モデル El Dorado(エルドラード)-II が
ICRA2008 Robot Challenge
に参加しました.
2008年5月19-23日に,米国 California州 Pasadena で開催されたIEEE International Conference on Robotics Automation (ICRA2008)では,第1回 Robot Challenge が
行われました.
吉田・永谷研究室の月面探査ローバー研究モデル El Dorado (エルドラード)-II は,
The Sand Box と名づけられた競技に参加しました.
El Dorado-II は,与えられた
フィールド内の自律探査を行い,Onto the surface,
Map the environment, Data collection, Back on the lander の4つの項目を達成し,
それぞれに賞状と
トロフィーが与えられました.
 
競技会の様子は Robot Watch にも紹介されています.
ICRA2008 Robot Challenge の公式ページはこちら
◆ニュース一覧に戻る◆
スプライト観測衛星 報道公開しました.

私たちが開発中のスプライト観測衛星の組み立てが,
最終段階に入りました.
2008年5月15日に下記放送局で,
姿を現し始めたSPRITE-SATの様子が報道されました.
NHK仙台,仙台放送,東日本放送,
宮城テレビ放送,東北放送
(順不同)
写真をクリックすると,スプライト観測衛星のホームページが開きます.
2008年5月16日河北新報朝刊27面
「スプライト観測衛星を公開・組み立て最終段階に」の記事が掲載されました.
- - - - - - - - - - - - - - - - - - - - - - -
「人工衛星を作っています.」
東日本放送「シリーズ東北大学の新世紀」にて,高橋幸弘講師(理学研究科)がスプライト観測の意義と衛星開発について語っています.
右の写真をクリックすると,動画閲覧可能です.
◆ニュース一覧に戻る◆
スプライト観測衛星 仙台で公開授業が行われました.
2008年5月13日に吉田教授,高橋幸弘講師(理学研究科),作家・瀬名秀明特任教授の三人が,
市名坂小学校六年生,107人に観測衛星や宇宙について分かりやすく講義しました.
  
2008年6月6日 「瀬名秀明がゆく!」にも衛星開発の状況および公開授業の様子を紹介する特集記事が掲載されました.
2008年6月1日 河北新報朝刊14面・15面
公開授業の様子および衛星開発の状況を紹介する特集記事が掲載されました.
2008年5月14日 河北新報朝刊26面
スプライト観測衛星公開授業の記事が掲載されました.
◆ニュース一覧に戻る◆
東北大学 宇宙にとばそう私の絵画&メッセージ 作品募集!
私たちが開発をすすめている「スプライト観測衛星(SPRITE-SAT)」の完成が近づき,子供たちから絵やメッセージの募集を始めました.
(主催:東北大学、河北新報社、仙台市天文台)
応募者全員(中学生以下)の名前とメッセージ,および絵画については全員の名前と優秀作品を,小型プレートに焼きこんで宇宙へ送り届けます.
また,7月1日新装オープン予定の仙台市天文台にて,展示も行います.
(本募集の受付は7月30日にて締め切りました.)
詳細はこちらからご覧ください
● 募集企画のページ
http://www.astro.mech.tohoku.ac.jp/SPRITE-SAT/outreach.html
● スプライト観測衛星のホームページ
http://www.astro.mech.tohoku.ac.jp/SPRITE-SAT/
◆ニュース一覧に戻る◆
東北大学機械系フォーラムが,秋葉原アキバ・スクエアUDXにて
行われました.
東北大学機械系フォーラム2008が,秋葉原アキバ・スクエアUDXにて,
5月9日(金)10日(土)に行われました.
吉田・永谷研究室では,惑星探査ローバーEl-Dorado(エルドラード)-II,レスキューロボットKENAF(ケナフ)のデモンストレーション,およびスプライト観測衛星(SPRITE-SAT)の実物大模型の展示を行いました.
フォーラム初日の様子は,ここに紹介されています.
また,10日の午後には同会場にて,サイエンスカフェ「航空宇宙のフロンティアを語ろう!〜東北大学から発信するエアロスペースの未来〜」も行われ,当研究室からは坂本助教および学生が話題提供者として参加し,SPRITE-SATおよびARLISSについて,来場者と語り合いました.
●日時:2008年5月9日(金)10日(土)10:00-17:00
●会場:アキバ・スクエア 東京都千代田区外神田4-14-1
●内容:機械系の多種多様な研究分野のパネル・機器展示に加え,最先端の研究成果を紹介する新技術セミナー,誰でも参加できるオープン講義やサイエンスカフェ,ロボット(ダンスロボット・セグウエィ・KENAF2台・惑星探査ローバー等)の実演など様々なイベントを企画しております。ぜひご来場していただき、東北大学機械系を実感してください。
◆ニュース一覧に戻る◆
日本ロボット学会主催 ロボット工学セミナー第45回シンポジウムにて,吉田教授が講演を行いました.
第45回シンポジウム「月・惑星探査で利用される日本のロボット技術」にて,
吉田教授が「月惑星探査ロボット研究の現状と課題」と題して講演を行いました.
また,当研究室の月・惑星探査ローバーのページも少しだけリニューアルしました.
◆ニュース一覧に戻る◆
東北大学工学部だより「あおば萌ゆ」に吉田研究室が紹介されました.
東北大学工学部だより「あおば萌ゆ」2008年春号(Vol.8)の
3ページ目「研究最前線」のコーナーで,吉田教授が月・惑星探査ロボットの研究,
および理学部と共同開発中の「スプライト観測衛星」について語っています.
(下の画像をクリックすると,それぞれの紹介ページが開きます.)
  
◆ニュース一覧に戻る◆
多田隈研究員,永谷准教授が「瀬名秀明がゆく!」に登場しました.
  当研究室のポスドク研究員・多田隈建二郎氏(写真・左)および永谷圭司准教授(写真・右)が「瀬名秀明がゆく!」シリーズ24・若手ロボット研究者がゆく!に登場しました.今回のシリーズでは,5名の若手ロボット研究者が,研究への思い入れや最新の成果について熱く語っています.ぜひご覧ください.
当研究室のポスドク研究員・多田隈建二郎氏(写真・左)および永谷圭司准教授(写真・右)が「瀬名秀明がゆく!」シリーズ24・若手ロボット研究者がゆく!に登場しました.今回のシリーズでは,5名の若手ロボット研究者が,研究への思い入れや最新の成果について熱く語っています.ぜひご覧ください.
(写真をクリックすると,それぞれが語る研究内容の部分が開きます.)
◆ニュース一覧に戻る◆
JAXA'sに登場しました.

宇宙航空研究開発機構(JAXA)の機関誌"JAXA's", No.18の16ページに当研究室の様子が紹介されました.
広がる宇宙ロボットの世界
2月打ち上げの超高速インターネット衛星「きずな」で行う
災害時のレスキュー・ロボット実験
吉田和哉・東北大学大学院教授
2007年11月に実施した「きく8号」を使ったレスキューロボットの遠隔操作実験の概要,2008年2月に打ち上げられた超高速インターネット衛星「きずな」で予定している発展的な利用実験,および衛星通信を使ってロボットを遠隔操縦する技術が,将来のローバー(無人移動車)による月面探査へつながってゆくことなどが紹介されています.
◆ニュース一覧に戻る◆
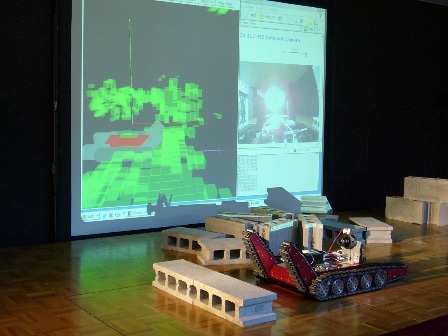
サイエンスアゴラにて,レスキューロボットに関するこれまでの研究開発の成果について講演・実演を行いました.
.jpg)
●「実演・情報通信技術を駆使したレスキューロボット」
●日時:2007年11月24日(土) 10:00-17:00
●会場:東京国際交流館 1F 多目的スペース
●内容:地震などの災害時に建物の中などに取り残された人を捜索するロボットシステムを開発しました.ロボットを遠隔操縦するために最先端の情報通信技術を駆使しており,技術講演とあわせて、ロボットのデモンストレーション(公開実験)を行いました.会場では,技術試験衛星VIII(きく8号)を用いてロボットを衛星通信により遠隔操縦して現場の状況を探査する実験も行い,開発してきたシステムが有効に機能することを確認しました.
◆サイエンスアゴラとは?
◆2007年11月14日,報道機関向けに「お知らせ」を発表しました.
◆本研究開発は,総務省 戦略的情報通信研究開発推進制度(SCOPE)「研究主体育成型研究開発・産学官連携先端技術開発」の研究課題「遠隔ロボットを用いた災害時マルチメディア情報収集技術に関する研究開発」として平成15年度に採択されたものであり,今回の公開デモは,5年間の成果報告の一環として実施されました.
◆今回の実験は,初のETS−VIII利用実験となりました.ETS−VIII利用実験は,大学,研究機関,行政機関,企業などが衛星利用を促進する目的で実施する実験であり,総務省が募集し審査の上採択されたものです.実験実施にあたりJAXA関係者をはじめとして多数の方々のご協力をいただきました.御礼申し上げます.
◆ニュース一覧に戻る◆
2007年度市民講演会にて,吉田教授が講演を行いました.
 ●題目:「宇宙探査ロボット〜極限環境への挑戦〜」
●題目:「宇宙探査ロボット〜極限環境への挑戦〜」
●主催:(社) 低温工学協会東北・北海道支部
●日時:2007年11月21日(水)15:00〜16:20
●場所:宮城県民会館 6階 601-602会議室
●参加費:無料
本講演会は,2007年度秋季低温工学・超電導学会の特別講演を兼ねていましたが,
一般市民の方々にも聴講いただきました.当日は小雪の舞う寒い日でしたが,多数のご来場を
いただき,会場は熱気に溢れていました.
(右図をクリックすると,ポスターを拡大表示(PDF)できます.)
◆ニュース一覧に戻る◆
東日本放送のシリーズ"東北大学の新世紀"に吉田教授が登場しました.
東日本放送・シリーズ"東北大学の新世紀"に吉田教授が登場しました.
オンエアの内容は,ここからも見ることができます.ぜひご覧になってください!
【2007年9月3日OA 「宇宙への道 ロボット工学」】
◆ニュース一覧に戻る◆
JAXAの観測ロケット実験に参加しました.
JAXAの観測ロケットS-520-23号機が,2007年9月2日(日)19時20分鹿児島県の内之浦宇宙空間観測所から打ち上げられ,打ち上げに成功しましたました.同ロケットは,最高高度300kmを目指して弾道飛行するもので,フライト時間は10分程度と短いものですが,ロケットの頭胴部には多数の観測機器が搭載され,飛行中に数々の貴重なデータを取得しました.また,あわせて地上観測も行われました.
当研究室では,MSIと名づけられた搭載機器の一つを担当し,飛行中のロケットからのテレメトリ(無線通信)によりデータを取得しました.JAXAの観測ロケット実験への参加は初めてでしたが,ロケット搭載用観測機器の開発に関して,非常に有益な経験を得ることができました.
◆ニュース一覧に戻る◆
スプライト観測衛星がGOSAT相乗り小型副衛星として採択決定!
本年1月1日の河北新報にも紹介されたスプライト観測衛星(SPRITE-SAT)が,2008年夏期に打ち上げ予定の温室効果ガス観測技術衛星(GOSAT)の小型副衛星(相乗り衛星)の一つとして選定されました.
【5月16日付JAXAプレスリリース】
また,今回相乗りミッションに選定された6機関が一堂に会したワークショップが,7月23日に東京都立産業貿易センター浜松町館において開催されました.同ワークショップの詳細については,こちらをご覧ください.私たちのSPRITE-SATについても詳しい説明がなされています.
【参考資料】同ワークショップで使用したプレゼンテーション
◆ニュース一覧に戻る◆
JAXAシンポジウム"ロボットが拓く宇宙開発のNEXT STAGE"に吉田教授がパネリストとして参加しました.
【開催案内】,【開催概要報告】by JAXA
お台場の日本科学未来館・大ホール(300人収容)での開催でしたが,立ち見客が出るほどの盛況ぶりでした.宇宙ロボット/ロボットによる宇宙探査に対する多くの方々の期待と熱気を感じることができました.
◆ニュース一覧に戻る◆
東北大学サイエンス・カフェで講演&ロボットデモを行いました.
2007年2月16日(金)に開催された東北大学サイエンス・カフェに,当研究室が登場しました!
「宇宙開発とロボティクス〜はやぶさ探査機、月面探査、そしてレスキューロボット〜」と題して吉田教授が講演を行ったのち,月面探査や災害レスキュー用ロボットのプロトタイプモデルによるデモを行いました.当日は多数の方にご来場いただきました.ありがとうございました.

【開催案内】2月16日(金)開催のサイエンス・カフェについて
【実施内容】河北新報社による特集記事
【CATV放送】
当日収録された講演およびロボットデモの様子が,地元CATV局(宮城ネットワーク、仙台CATV、塩釜ケーブルテレビ、気仙沼ケーブルテレビ)にて放映されました.(2007年4月)
【参加者アンケート】
当日の参加者からいただいたアンケート結果のまとめです(PDF)
【参考】サイエンスカフェについて
(東北大学サイエンスカフェのページより転載)
「サイエンスってむずかしい」、「質問したいことがあるけれども誰に聞いたらよいかわからない」、サイエンスカフェとは、そう思っている人たちと科学者が、コーヒーカップを片手にサイエンスについて気軽に話し合い、サイエンスの楽しさと社会貢献の姿を知ってもらう場です。 せんだいメディアテーク1階のオープンスクエア/カフェを会場に、毎月1回のペースで開催します。予約なしに、無料で、誰でもその場で自由に参加できるスタイルです。職場での仕事や学校が終わってから参加できるように、平日の18:00-19:45に開催します。 市民の方、中高生、大学生、企業の方、メディアの方の参加をお待ちしています。最初の30分は、取り上げた話題に関する最新の研究成果を講演者が分かりやすく紹介します。
◆ニュース一覧に戻る◆
東北大学小型衛星開発プロジェクトが,
元旦の河北新報1面トップに紹介されました.
スプライト観測衛星の概念図
私たちは,東北大学理学研究科・高橋幸弘講師のグループとともに,東北大学が主体となって開発・製作する50kgクラスの小型衛星(上図参照)の開発を進めています.この度,宇宙航空研究開発機構(JAXA)の大型衛星との相乗打上事業に応募し,高い評価を受け候補リストに登録されました.同衛星は,早ければ2008年度の打上が期待されており,計画が実現すれば,スプライトと呼ばれる高度40-90kmの発光現象の真上からの撮像と,雷雲からのガンマ線と放電発光の調査を行う世界で初めての衛星となります.
この話題が,平成19年元旦の河北新報1面トップに紹介されました.
・小型衛星の打上げ機会提供に係る
公募の実施について(平成18年5月10日,JAXA)
・「小型衛星の打上げ機会提供に係る公募」の応募結果について(平成18年9月4日,JAXA)
・Tonoku University News(英文)
◆ニュース一覧に戻る◆
「はやぶさ」チームが科学技術への顕著な貢献 in 2006
に選ばれました!
文部科学省科学技術政策研究所は,2006年12月26日,科学技術への顕著な貢献 in 2006を発表しました.同表彰のプロジェクト部門において,
「小惑星探査機『はやぶさ』の地球帰還への挑戦」
宇宙航空研究開発機構小惑星探査機「はやぶさ」チーム
代表:川口淳一郎プログラムマネージャー
が選ばれました.
私たちもJAXAの所外共同研究員として「はやぶさ」ミッションにかかわることができましたことを誇りに思うとともに,このような機会を与えてくださった関係各位に感謝の意を表したいと思います.
当研究室の「はやぶさ」への貢献:詳細はこちらへ
◆ニュース一覧に戻る◆
祝 技術試験衛星VIII型打上げ成功!
2006年12月18日H-IIAロケット11号機によって,JAXAの技術試験衛星VIII型(ETS-VIII,きく8号)が無事に打ち上げられました.同衛星は,その後静止ドリフト軌道への投入,大型送受信アンテナにも成功し,12月27日にクリティカルフェーズが終了しました.今後は,初期機能確認の後,同衛星を用いたJAXAによる基本実験,外部機関による利用実験が行われる予定です.
ETS-VIII(きく8号)は移動体通信の実験を行う衛星です.地上設備を用いたブロードバンド無線通信の技術は進歩が目覚しいところですが,ひとたび大震災等の広域災害が起きてしまうと,地上に設備を持つ通信手段はうまく使えないことが心配されます.これに対して軌道上の人工衛星を用いた通信は,地上災害の影響を受けませんので,災害時でも確実に使うことができる信頼のおける通信手段となります.
当研究室では,このように信頼性の高い衛星通信の技術を使って,災害地で罹災者の探索を行う移動ロボットを遠隔操縦し,効果的に情報収集する技術の研究開発を進めています(平成18年3月10日の記事参照).同研究にあたり,平成15年度より総務省戦略的情報通信研究開発推進制度(SCOPE)の支援をいただいております.
また,ETS-VIII(きく8号)の利用実験については,平成14年に実施された公募において採択されています.私たちの利用実験である探査ロボットの遠隔操縦実験は,2007年秋以降に実施していく予定です.
ETS-VIII利用実験の概念図
なお,同衛星の打上げおよび今後の利用実験に先立ち,2006年12月4日からの1週間に,ETS-VIIIの通信系を模擬した地上試験装置(シミュレータ)を用いた接続確認試験を,関係各位の協力を得て実施しました.ETS-VIIIの通信系はインターネット・プロトコルの信号をそのまま通すことができるので,専用通信端末を用いてIPアドレス等を適切に設定すれば,非常に簡単に衛星経由でのインターネット通信ができることを確認しました.また,同シミュレータは通信速度や伝送遅延,伝送のエラー率も模擬することができ,実際に衛星を使っているのと同等な現実的な設定で,ロボットの遠隔操縦や画像等の情報の性能を確認することができました.同時に,2007年秋以降の本番に向けて,完成させていかなければならないポイントも明確にすることができました.
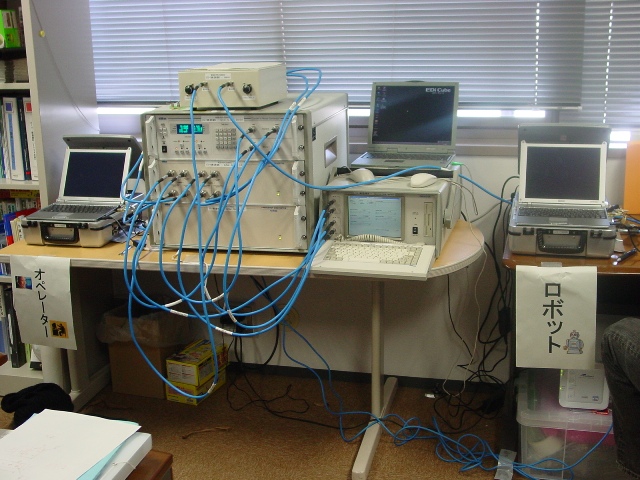
ETS-VIII衛星通信系の地上シミュレータ試験の様子
(配線が複雑に見えますが,利用ユーザとしては簡単な接続のみで使用可能です)
SCOPEロボットプロジェクトのページへ
◆ニュース一覧に戻る◆
震災対策技術展・仙台会場シンポジウム/セミナー
第1回「震災対策技術展/自然災害対策技術展」in 宮城・仙台会場が2006年10月4日(水)〜10月5日(木)の2日間にわたり,みやぎ産業交流センター(夢メッセMIYAGI)にて開催されました. 10月4日には同会場にて「ロボット技術による災害対策の可能性を探る」と題したシンポジウムが開催され,当研究室の永谷助教授が災害現場情報収集のための遠隔ロボットシステムについて講演を行いました.またこれに関連して,永谷助教授の研究の様子がNHK(仙台)にて紹介されました.
◆ニュース一覧に戻る◆
2006ARLISSカムバック・コンペティションで1位2位を独占しました!
2006年9月20〜22日米国ネバダ州にて開催されたARLISSカムバック・コンペティションで,当研究室の学生諸君が開発した2台の小型ローバーがワン・ツー・フィニッシュ(1位2位独占)を成し遂げました.
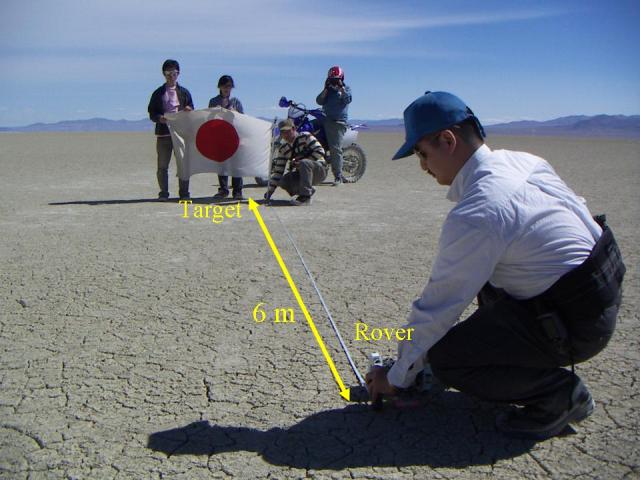
ARLISS (A Rocket Launch for International Student Satellites)プロジェクトとは,小型ロボット(ペイロード)を固体ロケットにより,高度4000メートルまで打ち上げ,ロケットから分離・放出されたペイロードがパラシュートを開き,地面に到達するまでの間あるいは着陸後に様々な実験を行う国際的なプロジェクトです.1999年からアメリカ合衆国ネバダ州Blackrock砂漠において行われています.
「カンバック・コンペティション」とは,ペイロードが自力(完全自律型)で目標地点に帰還する能力を競うコンテストであり,私たちは着陸後に地表を走行してゴールを目指す移動ロボット(ローバー)を開発しました.東北大学からは2機のローバーが参加し,Aチームは約3キロの距離を走ってゴール前の6メートル地点で自動停止しました.6メートルというのはGPS(Global Positioning System)の計測誤差範囲内です.一方,Bチームは強風に流されて約7キロも離れた場所に着地したのですが,7キロの距離を平均時速2.4キロの速さで走り抜き,ゴールまで44メートルに迫りました.3位以下を大きく引き離してダントツのワン・ツー・フィニッシュという結果となりました.
チームリーダーの吉川岳君(修士1年)は,JAXA殿の推薦を得て,スペイン・バレンシアで開催された国際宇宙会議(IAC)に参加し,現地にてARLISSローバーのデモを行いました.
ARLISSカムバックコンペティションの様子は仙台放送「シリーズ東北大学100年物語」でも紹介されました.
なお,本年の東北大学からのARLISS参加は,魅力ある大学院プログラム「航空宇宙フロンティア」の一環として実施されました.同授業の概要とローバー開発秘話が瀬名秀明氏によるインタビュー記事「瀬名秀明がゆく・シリーズ10」に紹介されました.
詳細はこちらへ
◆ニュース一覧に戻る◆
仙台放送「シリーズ東北大学100年物語」にて宇宙ロボット研究が特集されました
2007年に東北大学は創立100年を迎えますが,これにあわせて仙台放送では「シリーズ東北大学100年物語」と名づけた特集を,夕方のニュース枠にて随時放映しています.そのシリーズ10回目に「ロボット技術と未来社会」が放映されました.
同特集では,東北大学機械系における宇宙およびロボットの研究に焦点が当てられ,吉田・永谷研究室,内山・近野研究室,橋本・鏡研究室,加藤・足立研究室,田所研究室におけるそれぞれの研究の一端が紹介されました.最後に,吉田教授がインタビューに答えています.
放映されたビデオクリップは東北大学創立100周年記念DVDに採録されました.
◆ニュース一覧に戻る◆
「はやぶさ」初期解析結果がサイエンス誌に掲載されました!
2006年11月20日および26日(日本時)の2回,小惑星表面へのタッチダウンおよび上昇に成功した「はやぶさ」探査機によって得られた各種観測データによって.小惑星「イトカワ」の全貌が明らかにされました.「はやぶさ」探査の初期解析結果が,米国サイエンス誌6月2日号に掲載されました.同号には,一挙に7件の論文が掲載され「はやぶさ特集号」となりました.これは過去に例をみない快挙だそうです.
当研究室の貢献は特集号の7番目の論文
Touchdown of the Hayabusa Spacecraft at the Muses Sea on Itokawa
に反映されました.2006年11月20日のタッチダウンは当初の計画に反して,上昇用のガスジェットスラスタが自律的に噴射されず,探査機は小惑星の表面を数回バウンドし,最終的に表面上に約30分ほど滞在しました.しかし,このバウンドの様子を記録したフライトデータより,小惑星表面のさまざまな力学特性が読み取れることがわかりました.詳細な解析は現在も継続中ですが,サイエンス誌には,その初期検討結果が掲載されました.
特集号の概要および各論文の概要は,JAXAのホームページに掲載されていますのでご参照ください.
当研究室の「はやぶさ」への貢献:詳細はこちらへ
◆ニュース一覧に戻る◆
災害現場で情報収集を行うロボットの研究開発状況を公開しました.
私たちの研究室では,遠方の未知の惑星表面を異動探査する技術を応用して,大規模震災やテロ事件現場などで情報収集を行う遠隔探査ロボットシステムの開発を進めてきました.この研究開発プロジェクトは,平成15年度総務省戦略的情報通信研究開発推進制度(SCOPE)に採択され,産官学連携によって進めてきました.
共同研究への参加機関は,以下の通りです.
●東北大学 大学院工学研究科(吉田・永谷研究室)
●大阪大学 産業科学研究所(八木研究室)
●大阪大学 サイバーメディアセンター(竹村・清川研究室)
●情報通信研究機構(NICT)(セキュアネットワークグループ)
●(株)IHIエアロスペース
●(株)映蔵
本研究では,以下に示す4つのサブテーマの実現を目標として,災害時マルチメディア情報収集技術の研究開発を進めております.
-
大規模震災等の広域災害において適切な情報収集を行うため、使用可能なさまざまな無線通信システムとネットワークを有機的に結合する危機対応通信管理技術の開発
(Information and Communication Technology)
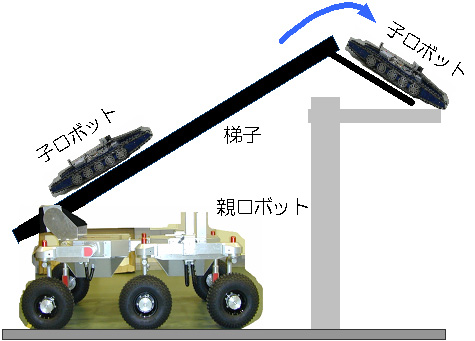
- 災害現場における親子型移動探査ロボットの開発とその遠隔操縦技術の確立
(Robotics Technology)
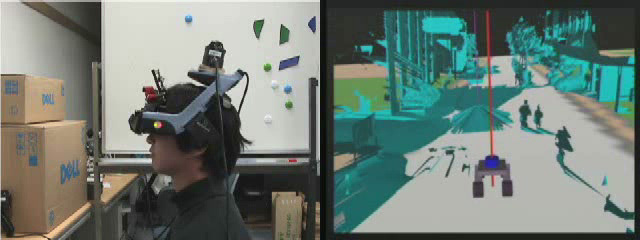
- 効率的な環境データの収集と拡張現実感を用いた臨場感の高いデータ提示技術の開発
(Information Technology, Augmented Reality)
- 技術試験衛星VIII型 (ETS-VIII)
通信実験衛星を用いた技術実証,ならびに,そのために必要な通信機器、インターフェースをロボット(移動局)および操縦オペレーション室(固定局)の実装
(Satellite Communication Technology)
5年間(予定)にわたるプロジェクトの最初の3年間で,上記テーマの項目2.および3.について,重点的に開発してきました.平成18年3月10日に,平成15〜17年度の3年間に開発した災害現場情報収集ロボットシステムの公開実験を実施し,多数の報道機関の方に取材していただきました.
SCOPEロボットプロジェクトのページへ
◆ニュース一覧に戻る◆
衛星設計コンテストで「設計大賞」を受賞しました!
2005年10月30日に開催された「第13回衛星設計コンテスト」で,東北大学大学院工学研究科・当研究室の学生諸君と,理学研究科学生の学生諸君の共同チームで設計検討を行った「地球大気流出観測衛星」が,最高賞である設計大賞に選定されました.
詳細はこちらへ
JAXA公式発表文
★受賞者(理学研究科メンバー)インタビュー★
◆ニュース一覧に戻る◆
航空宇宙工学専攻が
「魅力ある大学院教育」イニシアティブに採択されました!
東北大学院工学研究科 航空宇宙工学専攻から申請を出していた「フライト実践による航空宇宙フロンティア」プログラムが文部科学省の「魅力ある大学院教育」イニシアティブに採択されました.
同イニシアティブは,現代社会の新たなニーズに応えられる創造性豊かな若手研究者の養成機能の強化を図るため,大学院における意欲的かつ独創的な教育の取組を重点的に支援する平成17年度より開始された文部科学省の事業です.
「フライト実践」をベースとした教育の取り組みは,既に当研究室で実行してきたことですが,このたび文部科学省の推進事業として認められましたので,専攻全体の教育プログラムとしてますます充実していきたいと思います.
プログラム内容の詳細はこちらへ
「魅力ある大学院教育」イニシアティブについて(JSPS)
◆ニュース一覧に戻る◆
ARLISSカムバック・コンペティションで優勝しました!
2005年9月21〜23日米国ネバダ州にて開催されたARLISSカムバック・コンペティションで,当研究室の学生諸君が開発した小型ローバー"NOKONOKO"が優勝しました.
 
ARLISS(A Rocket Launch for International Student Satellites)プロジェクトとは,日米の学生が開発した小型ロボット(ペイロード)を固体ロケットにより,高度4000メートルまで打ち上げ,ロケットから分離・放出されたペイロードがパラシュートを開き,地面に到達するまでの間あるいは着陸後に様々な実験を行うプロジェクトです.1999年からアメリカ合衆国ネバダ州Blackrock砂漠において行われています.
「カンバック・コンペティション」とは,ペイロードが自力(完全自律型)で目標地点に帰還する能力を競うコンテストであり,私たちは着陸後に地表を走行してゴールを目指す移動ロボット(ローバー)を開発しました.私たちのローバーは,ゴールから約4,200mの地点に着陸し,約4,000mの距離をゴールに向かって自律的に走破して,好成績を達成しました.
なお,同活動に参加した学生旅費の一部は,「国際コンピテンシー人材育成教育プログラム」およびUNISECよりご支援いただきました.ここに感謝の意を表します.
詳細はこちらへ
◆ニュース一覧に戻る◆
祝「はやぶさ」小惑星イトカワに到着!
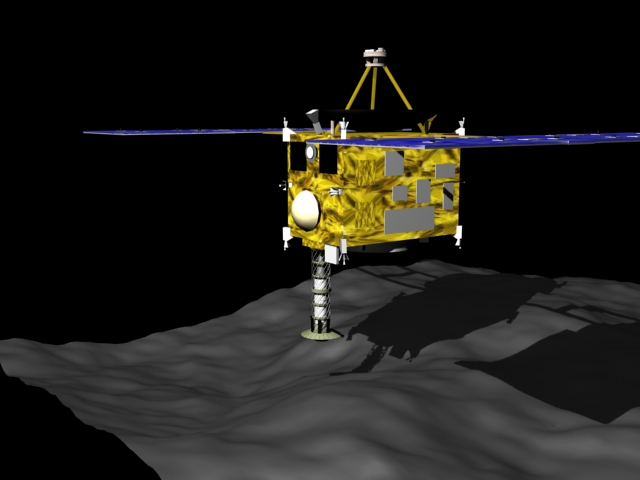
最新のタッチダウンシミュレーション動画を公開します
2003年5月9日内之浦より打ち上げられた小惑星探査機「はやぶさ」が,2年4ヶ月の旅を経て,2005年9月12日小惑星イトカワから20kmの地点に到着・相対静止に成功し,すばらしい写真が送られてきました.同探査機は,2005年11月末までに小惑星表面にタッチダウンし,サンプルの採集を試みます.小惑星表面の様子(詳細な起伏)はタッチダウン直前までわかりませんが,当研究室では,表面の起伏についていくつかのケースを想定してタッチダウンのシミュレーションを行っています.今回は2種類4本の動画を公開します.
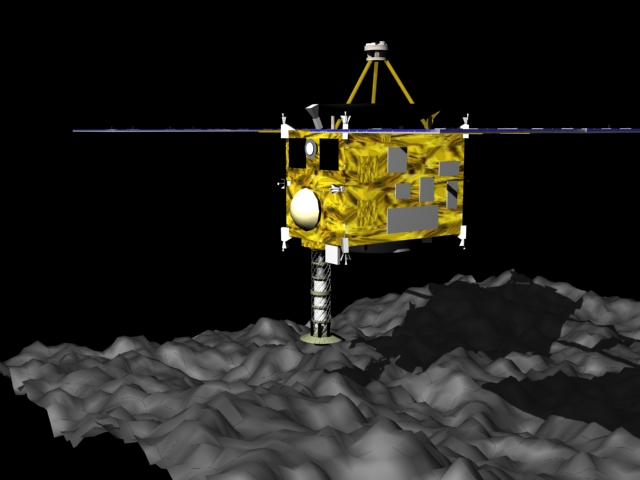
「はやぶさ」タッチダウン最新シミュレーション
なお,小惑星表面へのタッチダウンは2005年11月20日および26日(日本時)の2回成功裏に実施されました.
◆ニュース一覧に戻る◆
永谷圭司助教授が加わりました.
2005年4月1日より,永谷圭司助教授がメンバーに加わりました.永谷氏は,筑波大学油田研究室で学位を取り,米国カーネギーメロン大学研究員,岡山大学講師を経て,本学へやってまいりました.専門分野は,移動ロボットの機構,制御,ナビゲーションです.当研究室では,月・惑星探査のための移動ロボット(ローバー)や防災用フィールドロボットの研究・開発に精力的に取り組んでいく予定です.

永谷助教授のページ(和文)
永谷助教授のページ(英文)
◆ニュース一覧に戻る◆
「見上げる宇宙から使う宇宙へ2004」シンポジウム
2004年12月16日,JAXA主催の「見上げる宇宙から使う宇宙へ2004:宇宙の利用を考えるシンポジウム」が開催されました.同シンポジウムでは,時の人,ライブドア・堀江貴史社長が,有人宇宙飛行の夢を語り話題になりました.同じ日の午後,吉田教授は,「衛星通信の災害ロボットへの応用」という題目で,現在進めている研究プロジェクト「遠隔ロボットを用いた災害時マルチメディア情報収集技術の研究」について講演を行いました.
◆ニュース一覧に戻る◆
国際宇宙大学サマーセッションプログラム(ISU SSP)
1998年以来(2000年を除く)吉田教授は,国際宇宙大学(ISU)サマーセッションプログラム(SSP)に非常勤講師として参加しています.今年もカナダ・ブリティッシュコロンビア大学にて開催されるSSP2005に参加します.ロボティクス・ワークショップに参加し,そこで LEGO Mindstorms を使ったロボットコンテストをオーガナイズしています.
◆ニュース一覧に戻る◆
東北大学オープンキャンパスが実施されました
2003年7月30, 31の両日にわたり,東北大学青葉山キャンパスにてオープンキャンパス(研究室一般公開)が実施されました.来場者数は,両日あわせて2000人に達したとのことです.吉田研究室では,月・惑星探査ローバーのデモを中心に研究紹介を行いました.吉田研究室にも,数多くの方々が足を運んでくださいました.御礼申し上げます.
・ローバーデモの様子1 (mpg, 2.1M)
・ローバーデモの様子2 (mpg, 10.1M)
・ローバーデモの様子3 (mpg, 8.4M)
◆ニュース一覧に戻る◆
吉田研究室卒業生/現役学生の声のページを追加
吉田研究室卒業生/現役学生の声のページへ
◆ニュース一覧に戻る◆
MUSES-C 5月9日打上げ成功,「はやぶさ」と命名
文部科学省宇宙科学研究所(宇宙研,ISAS)の小惑星探査機・MUSES-Cが鹿児島県内之浦より
2003年5月9日に予定通りに打ち上げられました.
打ち上げ成功後,同探査機は「はやぶさ」と命名されました.
この探査機は,小惑星1998SF36(「イトカワ」と命名)にタッチダウンし,その表面から小惑星のかけら(サンプル,岩石標本)を地球に持ち帰ろうという,たいへんチャレンジングなミッションを行います.
「はやぶさ」という名前は,目標に向かって精確に飛び,ホバリングし,サッと獲物を獲る姿が,同探査機がタッチ・アンド・ゴーでサンプルを得る様子に似ているところから,つけられました.
私たちの研究室では,サンプル採集の方式,採集のための装置(=サンプラ−)の検討や,タッチダウンダイナミクスの解析検討などに加わってきました.
私たちが研究開発に参加した探査機が,大きな目標に向けて順調に飛行を続けていることを,たいへん嬉しく思います.
しかし,いまはまだ長い旅の始まりにすぎません.
小惑星に到着してサンプル採集を行うのが,2年後の2005年,そして地球に帰還するのが4年後の2007年です.
4年間にわたる長い宇宙の旅ですが,ミッションの全てが成功し,小惑星のサンプルを格納したカプセルが,無事に地球に戻ってくることを,楽しみにしています.
詳細はこちらをご覧下さい.
「M-V-5号機/MUSES-C」打ち上げに関する記事はこちらです.
「はやぶさ/MUSES-C」に関する公式ホームページはこちらです.
◆ニュース一覧に戻る◆
三菱電機サイエンスサイト・DSPACEにて,吉田研究室の研究内容が紹介されています.
三菱電機サイエンスサイト・DSPACE
にて,私たちの研究内容が紹介されています.吉田教授が女性ナビゲータのインタビューに答えるかたちで,宇宙ロボット研究の内容を紹介します.実験の様子を紹介する動画や,私たちが研究用に作ったシミュレーション動画も,ふんだんに使われています.

 第1回:
第1回:
軌道上での活躍が期待されているフリーフライング宇宙ロボットの紹介
です.技術試験衛星ETS-VIIで行われた実験の紹介,フリーフライングロボットは,
宇宙のゴミ(スペースデブリ)の増加防止に役割が期待されていることなどが,
紹介されています.

 第2回:
第2回:
宇宙ステーションに搭載されるロボットアームについての紹介です.現在の
ロボットアーム使われ方は,不器用なクレーンのようなものです.
それをいかに器用で便利なものにしていくのかが重要な課題です.
ロボノートと呼ばれるヒューマノイド(人間)型の船外活動支援ロボットや,
サッカーボール型の船内活動支援ロボットの可能性についても紹介しています.
 第3回:
第3回:
月や惑星の表面上を探査する移動ロボット:ローバーについての紹介です.
1997年のアメリカ火星探査パスファインダーミッションでは,ローバーの有用性が
示されました.アメリカは2003年にも,より大きなローバーを搭載した探査機を
2機火星に送り込む予定です.日本でも,ローバーを使って月面上を移動探査する
計画が検討されています.

 第4回:
第4回:
惑星探査をするユニークなロボットたちの紹介です.
月の表面の砂・レゴリスを掘削するモグラ型ロボット,アリジゴク型掘削方式,
重力が非常に小さい小惑星表面で,思い通りの移動を行うための探査ロボットの
アイディアなどを紹介します.
|