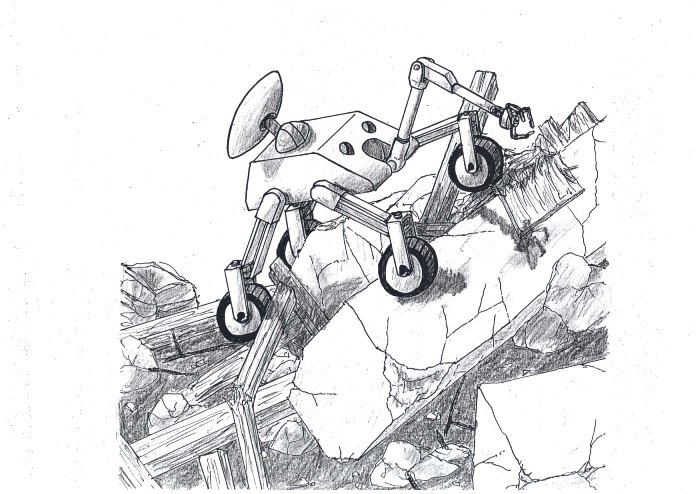
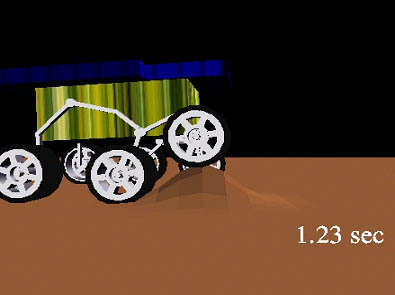
 1997年,米国NASA/JPLが開発した小型ローバーが火星の表面を移動探査し大きな成果を挙げたことに示されるように,月および惑星探査においては自律性の高い遠隔操縦型走行探査ローバーが重要な役割を果たします.わが国では,宇宙航空研究開発機構(JAXA)のリーダーシップのもとSELENEシリーズと呼ばれる月探査計画が進められています. 本研究室では,月・惑星探査ローバーの機構と制御の基礎研究として,自然不整地を走行するロボットの運動力学を明らかにした上で,対不整地走行性能の高い走行機構/サスペンション機構の研究や,砂地のようなすべりやすい地面を自在に走行するための制御法の研究を行っています.基礎実験を通して,車輪と地面との間の力学関係についての理解を深めることにより,砂の斜面を滑らずに登るための,あるいは車輪すべりによって生じるずれを補正するための,効率的な走行制御法を明らかにしてきています.
--- 具体的な研究テーマ ---
月面極域探査・掘削ロボットの研究 宇宙ステーション搭載ロボットの研究 小惑星探査ミッションMUSES-C トップページへ. (c) The Space Robotics Lab, Tohoku University, JAPAN All right reserved.
For any question, please contact here. |
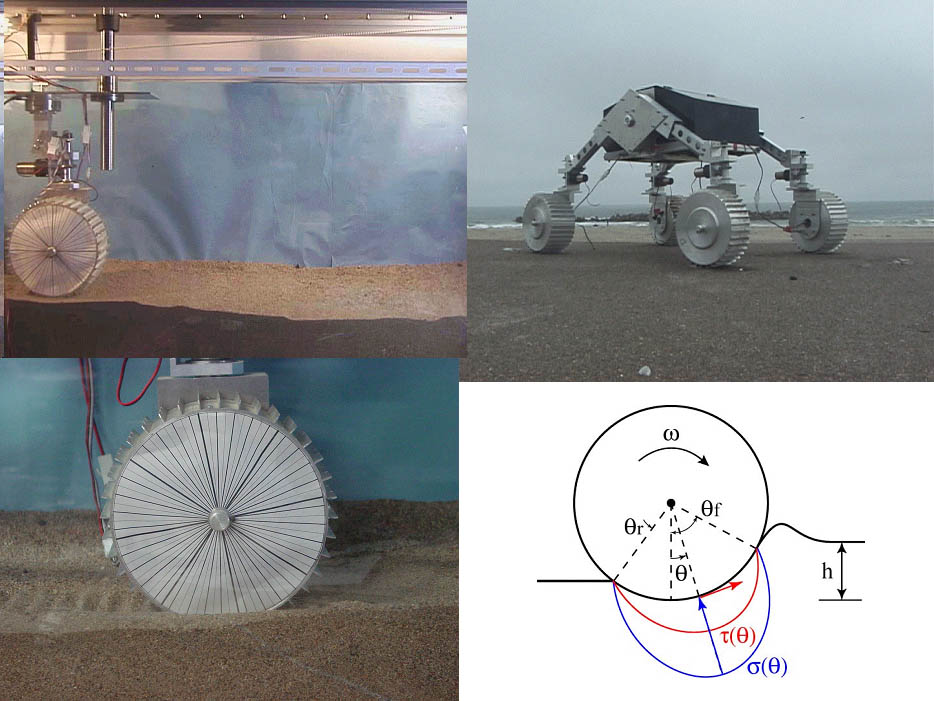
 私たちは,様々な環境でローバーのフィールド実験を行っています.
私たちは,様々な環境でローバーのフィールド実験を行っています.